

High-winding-factor permanent magnet brushless motor and design and fault-tolerant control method
A permanent magnet brushless motor, high winding technology, applied in motor control, AC motor control, single motor speed/torque control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
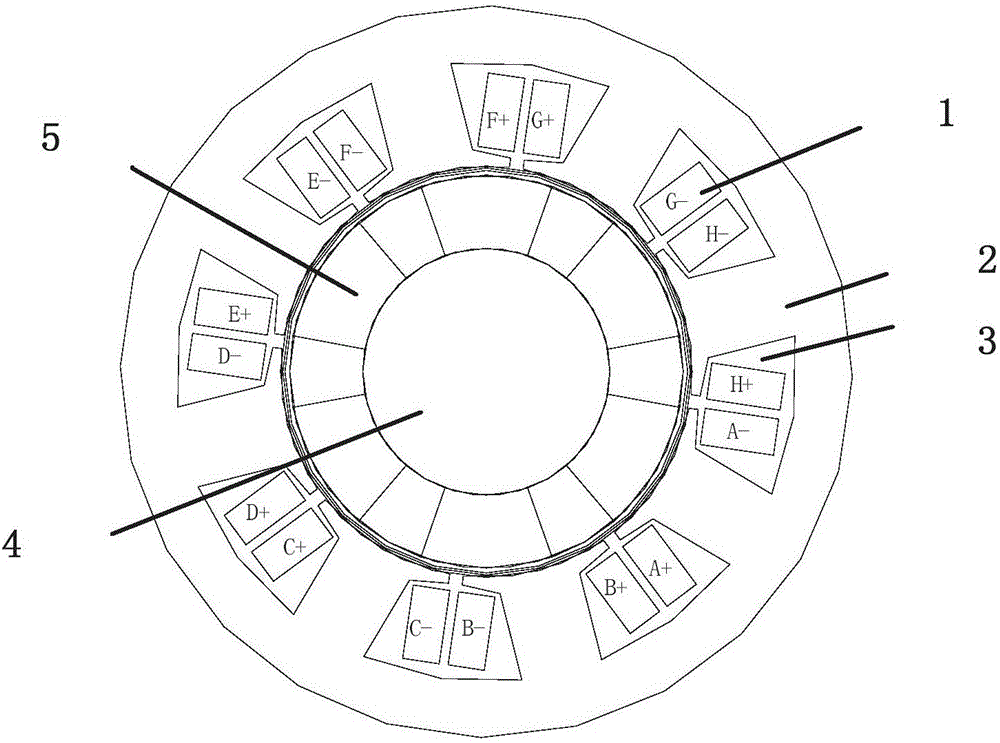
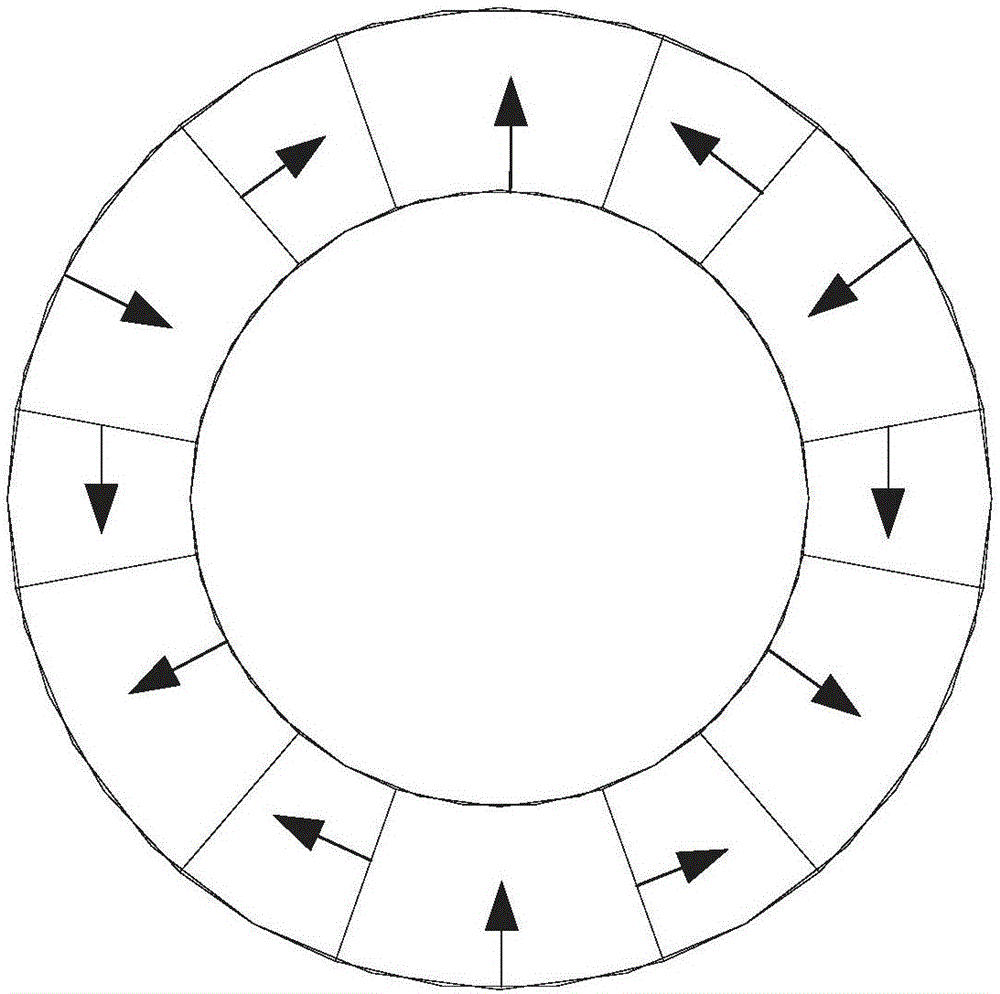
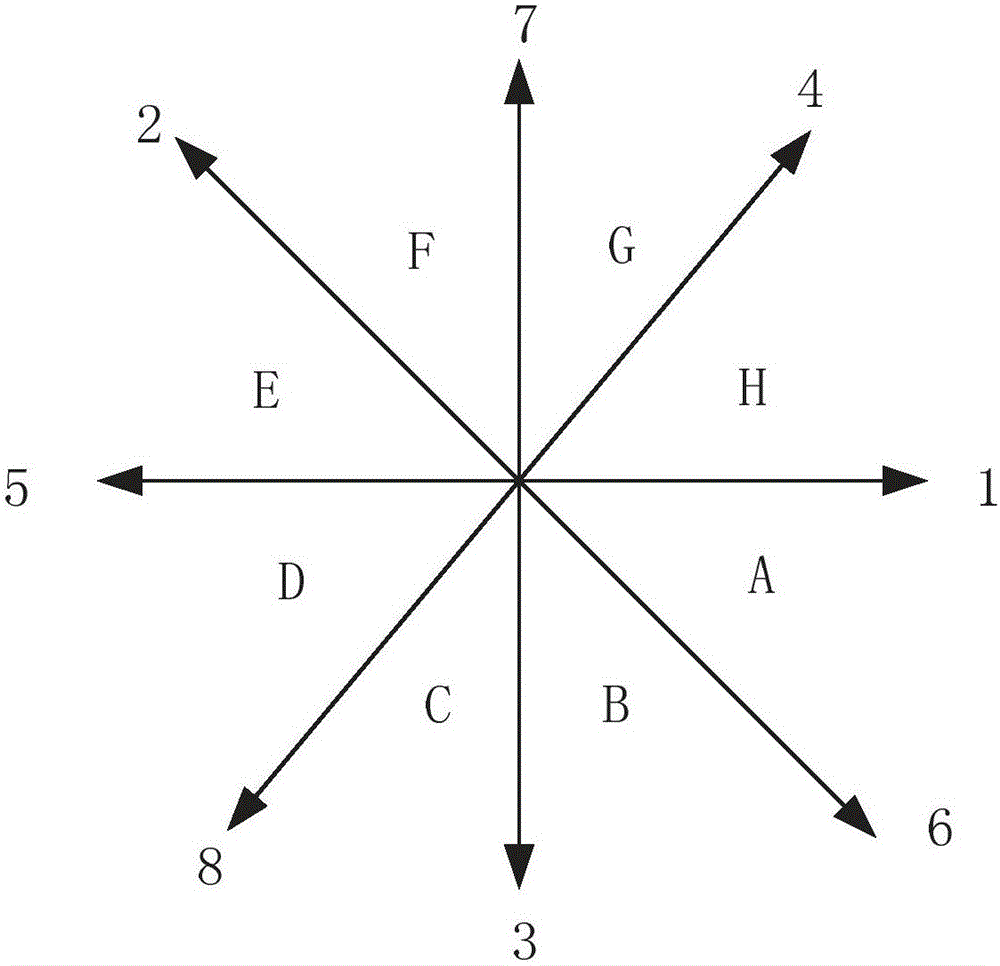
[0115] The motor of the present invention is a permanent magnet brushless motor with fractional slot concentrated winding. The permanent magnet adopts a surface-mounted type, and the Halbach magnetization method is used. The armature winding is located in the armature slot on the stator. Two sets of windings belonging to different phases are placed in each armature slot; the permanent magnet has 3 pairs of poles; what the motor of the present invention adopts is a fractional slot concentrated winding structure. According to the definition of electromechanics, the number of slots per pole and phase z is the number of armature slots, p is the number of pole pairs, and m is the number of phases, so the number of slots per pole and phase of the motor described in the present invention Slot angle Therefore, assuming that No. 1 slot is at 0°, then No. 2 slot is at 3*45°=135°; No. 3 slot, No. 4 slot, No. 5 slot, No. 6 slot, No. 7 slot, 8 The number slots are counterclockwise and ...
Embodiment 2
[0117] According to the method of calculating the winding coefficient of the fractional slot concentrated winding, because the motor is a fractional slot motor, the formula for calculating the winding coefficient in electromechanics cannot be used. The fractional slot motor must first be found to be equivalent to an integer slot motor. Calculate the winding factor. The 8 slots and 6 pole motors proposed by the present invention are equivalent to each unit motor, because the number of armature slots is 8, and the number of permanent magnet poles is 6, and the motor is originally a unit motor (unit motor: the number of armature slots and The greatest common divisor of pole pairs is 1). Therefore, according to the method introduced in "Permanent Magnet Brushless DC Motor Technology", the number of slots per pole and each phase can be q=1 / 3, and the slot pitch angle is 135° fractional slot concentrated winding motor. Therefore, the fractional slot motor described in the present i...
Embodiment 3
[0126] The following will clearly and completely describe the technical solutions in the embodiments of the present invention in combination with the derivation process in the embodiments of the present invention. Now assuming that phase A is open, give the specific steps of the open circuit fault tolerance algorithm
[0127] Under normal circumstances, the current of each phase can be given by the following formula:
[0128] i a =I m sin(ωt)
[0129] i b =I m sin(ωt-pi / 4)
[0130] i c =I m sin(ωt-pi / 2)
[0131] i d =I m sin(ωt-3*pi / 4)
[0132] Where: ωt is the angular frequency, i a , i b , i c , i d is the expression of each phase current, I m is the current amplitude of each phase, pi=180°. Then the expression of magnetomotive force of each phase is:
[0133] MMF a = 1 2 Ni a s i n ( θ )
[0134] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More