

Target positioning method based on RGBD
A target positioning and target technology, which is applied in the field of target positioning based on RGBD, can solve the problems of changes in the robot's mass distribution and balance conditions, the inability to meet the requirements of the robot's rapid movement, and the robot's inability to obtain its own position information. Interference with similar target colors, enhanced robustness and real-time performance, and fast calculation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0045] Embodiment: a kind of object localization method based on RGBD.
[0046] In the present embodiment, the second generation Kinect sensor is adopted, which includes an RGB camera, an infrared receiver, an infrared emitter and a microphone array, and the RGBD sensor world coordinate system is O n x n Y n Z n, referred to as the N coordinate system, the origin of the N coordinate system is the center point of the color camera of the sensor, the Z axis of the N coordinate system is perpendicular to the Kinect front panel, the X axis goes to the left along the front panel, and the Y axis goes down along the front panel.
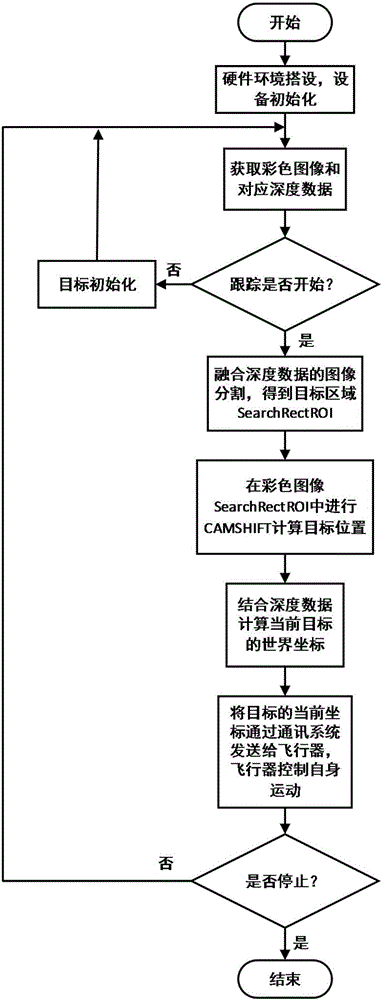
[0047] refer to figure 1 As shown, an RGBD-based target positioning method includes the following steps:
[0048] Set up the hardware environment and initialize the device;
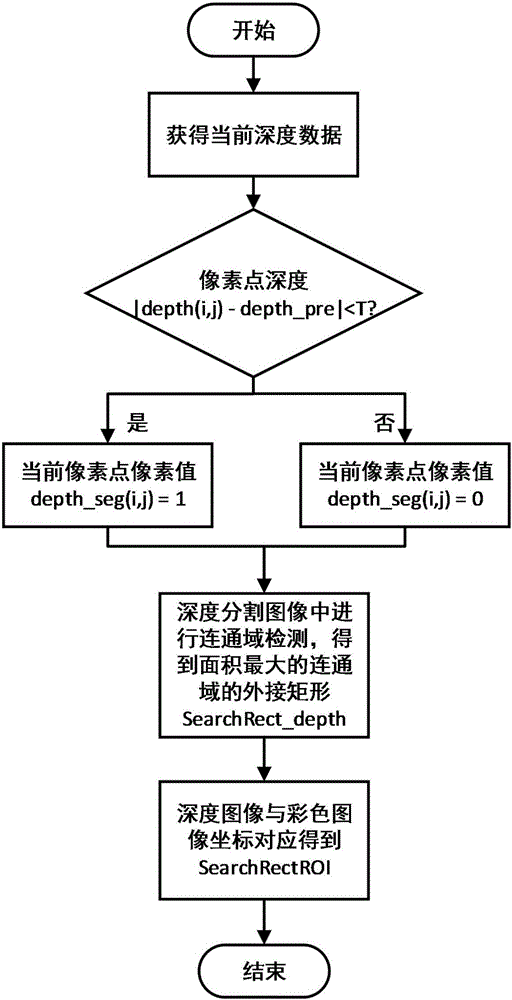
[0049] Use the RGBD sensor to obtain the depth image and color image of the aircraft in the current frame during flight, segment the depth image based on the depth data, obtain the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More