

Method for improving autonomous flight stability of rotorcraft and unmanned aerial vehicle patrol system
A multi-rotor aircraft and unmanned aerial vehicle technology, applied in the field of methods and unmanned aerial vehicle patrol systems, can solve the problems of aircraft instability, technical difficulty, low precision, etc., to avoid sudden lack of lift, ensure rotor speed, and ensure driving ability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0038] A method for improving the autonomous flight stability of a rotorcraft, comprising the steps of:
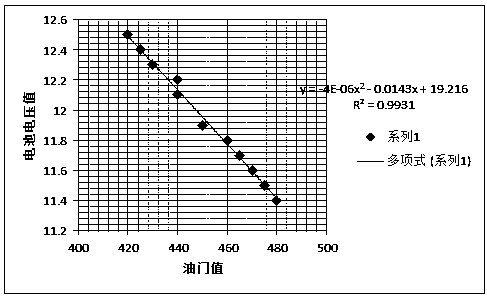
[0039] 1. Obtain the voltage value of the lithium battery and the corresponding PWM value when the multi-rotor aircraft performs various flight actions and maintains a stable flight state (this implementation only provides specific instructions on how to achieve stable take-off, and the test methods of other flight actions are related to take-off similar).
[0040] In this embodiment, the assembled quadrotor UAV is selected as the test prototype, and within the effective output power range of the lithium battery, the voltage value of the lithium battery and the corresponding throttle value are measured 11 times after the UAV takes off successfully and stably under manual control. (that is, the PWM value), the measurement data is as follows:
[0041] Group No
1
2
3
4
5
6
7
8
9
10
11
Throttle value
420
425
430
44...
Embodiment 2
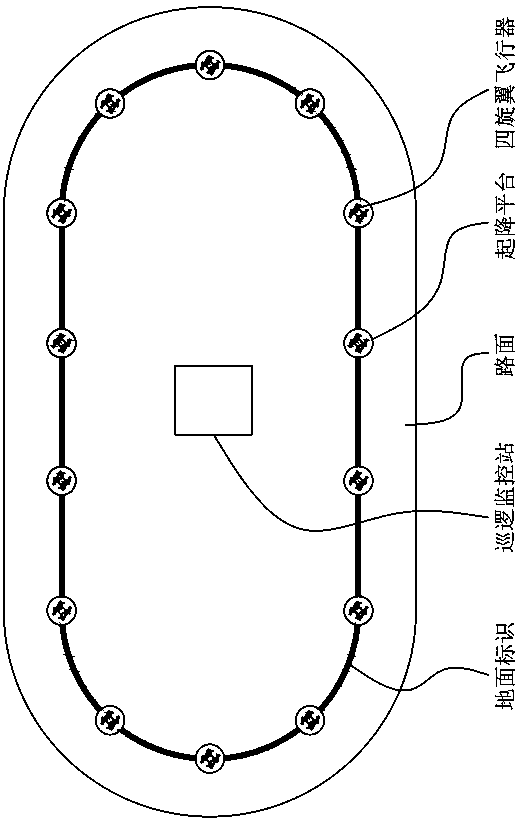
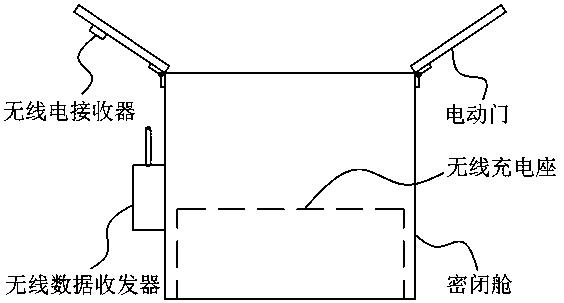
[0046] like figure 2 As shown, based on the improved UAV based on the method in Embodiment 1, this embodiment provides a UAV patrol system, which includes a patrol monitoring station (the patrol monitoring station is manually guarded), composed of multiple quadrotor aircraft UAV clusters, the same number of take-off and landing platforms as the quadrotor aircraft, ground markings for providing navigation for the quadrotor aircraft, and wireless data transceivers set on the take-off and landing platforms and communicating with the patrol monitoring station ( figure 2 not shown in ); the take-off and landing platform can dock the quadrotor aircraft and provide charging for it, and each take-off and landing platform can park a quadrotor aircraft; the ground marking marks the patrol route on the ground, and the patrol route is end-to-end Closed graphics, all take-off and landing platforms are set at intervals on the patrol route; the quadrotor aircraft includes an aerial imaging...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More