

Search algorithm and verification method for swarm robots based on physarum polycephalum foraging
A swarm robot and multi-headed vesicular fungus technology, which is applied in the field of bionic search algorithms, can solve the problems of long execution time, long execution time and low accuracy, and achieves the effect of low dependence on robot communication, high efficiency and application value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
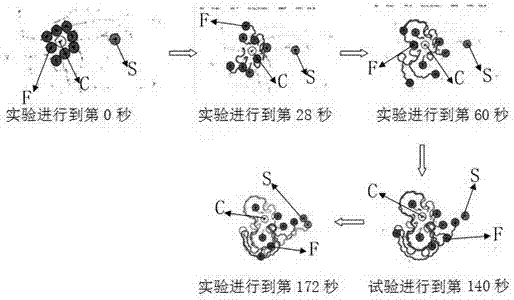
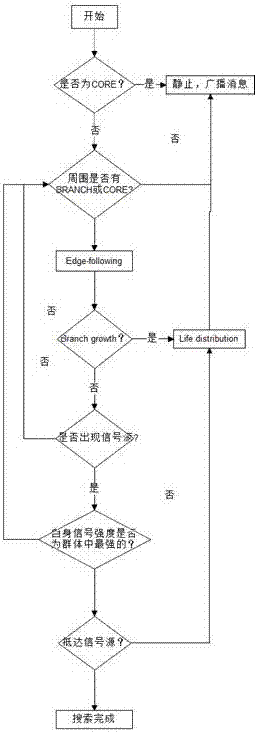
[0039] Such as figure 1 As shown, a group robot search algorithm based on Phylophama polycephala foraging, the search algorithm includes the step of dividing and defining group robots and the step of computing and processing data.
[0040] The step of dividing and defining group robots is to divide the group robots into three types of robots according to the state of the robots, which are named CORE, BRANCH and FORAGER respectively, wherein CORE remains in a static state during the entire search movement and is transmitted through wireless communication. Its own type and trajectory radius; BRANCH belongs to the movement before stopping, keeps a static state, and provides direction for the edge movement of the search robot; FORAGER moves according to Edge-following, there is only one BRANCH or no robot of any type within the communication radius When changing to BRANCH, all robots except CORE execute the same program; in addition, the robot group sets up three simple and basic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More