

Indoor robot positioning and environment modeling method based on UWB (ultra-wide band) and multiple sensors
An indoor robot, multi-sensor technology, applied in positioning, instruments, measuring devices, etc., can solve the problems of system anti-interference and stability to be improved, high nonlinearity of robot motion, insufficient stability of positioning system, etc. Resource utilization, high positioning accuracy, and the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
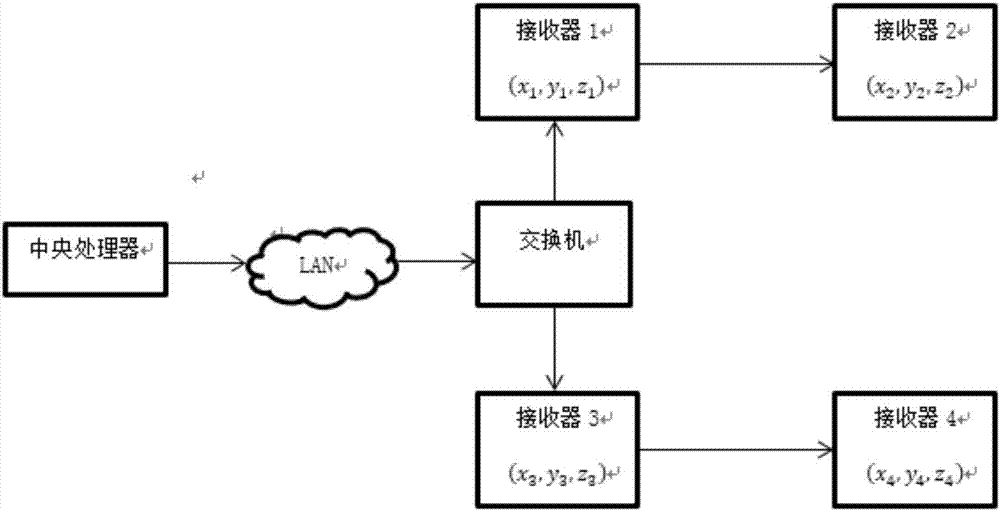
[0027] In the embodiment of the present invention, first configure the switch network parameters, arrange UWB receivers on the ceiling according to the principle of every 30-100 meters, connect each UWB receiver end-to-end through a daisy chain or a star connection with a shielded network cable Connecting with the switch, on the one hand, it can realize the full coverage of the signal in the positioning area, and on the other hand, it can reduce the number of deployments of UWB receivers. Changes in the indoor environment will inevitably affect the degree of signal attenuation, so the placement distance of UWB receivers needs to be adjusted according to the actual situation. When the indoor area is small, the distance between UWB receivers should be set at about 30 meters. The distance should not be too small, otherwise it will easily cause interference and affect the positioning accuracy; when the indoor area is large, the distance between the receivers can be enlarged, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More