

Motor current of closed-loop driving method and device for unmanned aerial vehicle, equipment and storage medium
A current closed-loop, dragging device technology, used in current controllers, electronic commutators, single motor speed/torque control and other directions, can solve problems such as poor load capacity, easy step loss, etc. Reduce control links, reduce the effect of direct axis demagnetization or magnetization effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The application will be further described in detail below with reference to the drawings and embodiments. It can be understood that the specific embodiments described here are only used to explain the related invention, but not to limit the invention. In the case of no conflict, the embodiments in the application and the features in the embodiments can be combined with each other. In addition, it should be noted that, for ease of description, only the parts related to the invention are shown in the drawings.
[0055] The application will be described in detail below with reference to the drawings and in conjunction with the embodiments:
[0056] In this embodiment, the closed loop refers to the current closed loop, and the open loop refers to the speed open loop.
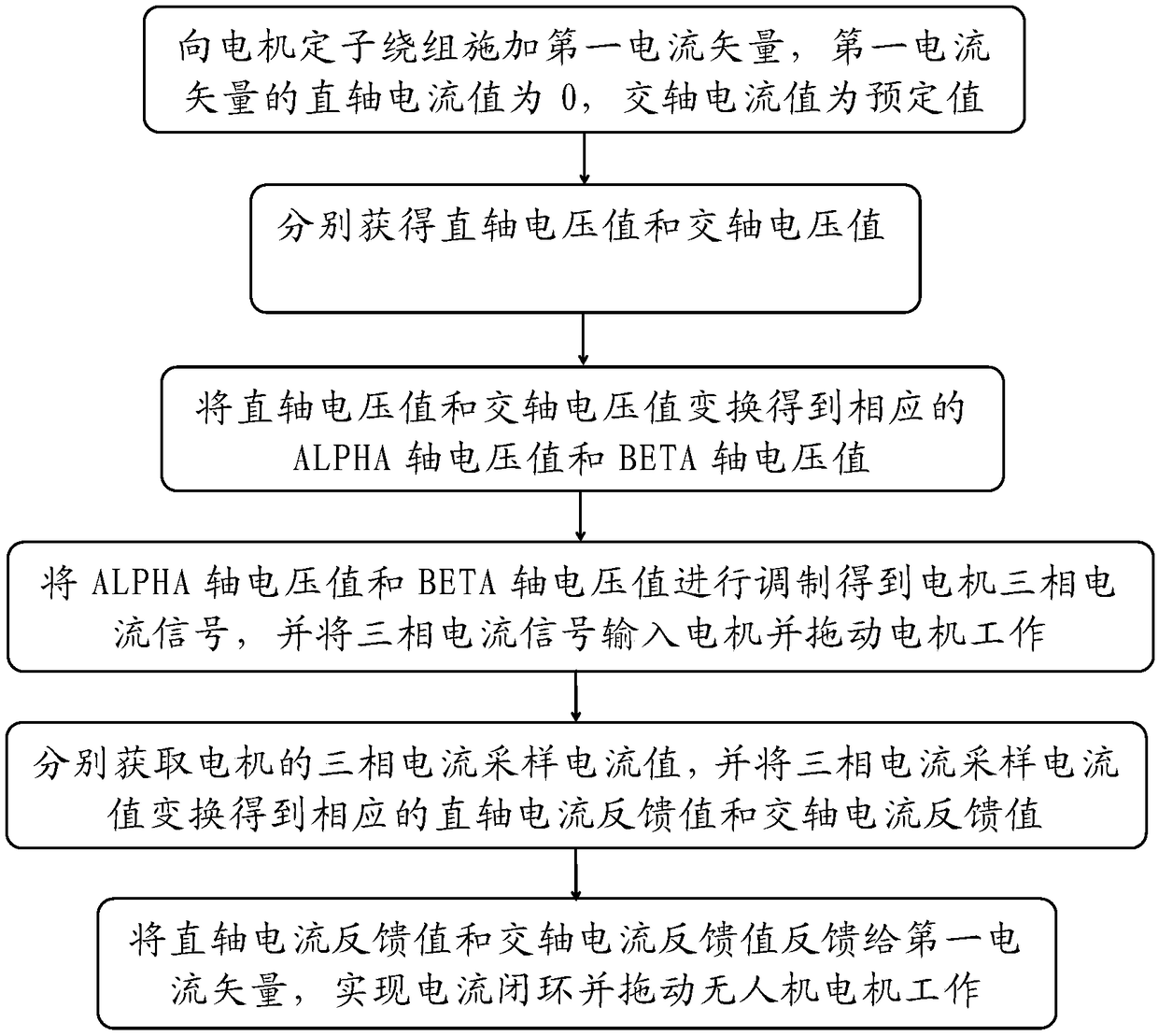
[0057] Such as figure 1 Said, the current closed-loop dragging method of an unmanned aerial vehicle motor illustrated in this embodiment includes the following steps: applying a first current vector to the stator ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More