

A parallel robot for prostate flexible needle implantation
A flexible needle and robot technology, applied in surgical robots, X-ray/γ-ray/particle irradiation therapy, treatment, etc., can solve problems such as difficult to guarantee positioning accuracy, affect treatment effect, soft tissue trauma, etc., and achieve precise spatial position positioning, The effect of enhancing the treatment effect and improving the accuracy of implantation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
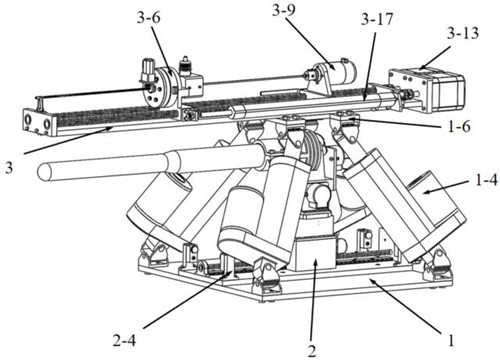
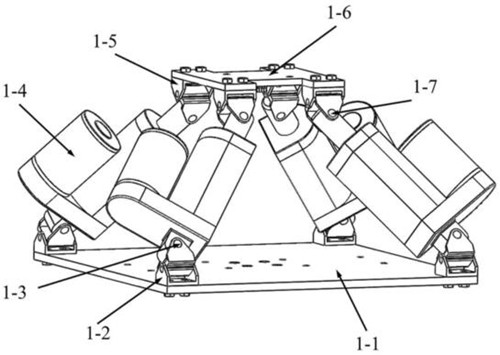
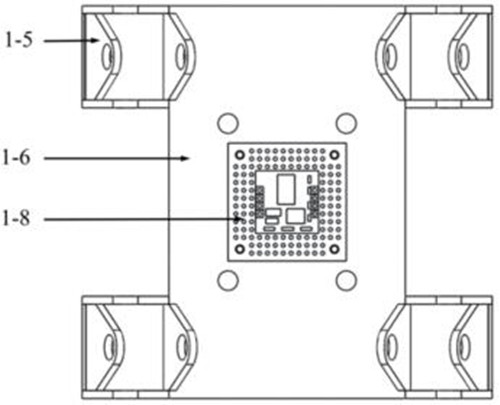
[0032] Example 1: Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , Figure 8 , Figure 9 , Figure 10 , Figure 11 , Figure 12 As shown, the specific embodiment employed the following technical solution: a prostate flexible pin particle is implanted in parallel, characterized in that it includes a parallel posture adjustment mechanism 1, an ultrasonic image navigation mechanism 2 and a flexible pin granary implant 3, The parallel posture adjustment mechanism 1 is characterized by a lower base 1-1 through a bolt connected to an operating table or other robot arm, an ultrasonic image navigation mechanism 2 is fixed by a bolt, a concatenation posture adjustment. The lower base 1-1 of the mechanism 1, the flexible pin particle implant mechanism 3 is fixed to the upper holder 1-6 of the parallel postal adjustment mechanism 1 by the flexible pin particle implant mechanism 3-1 by the bolt 3-1; the parallel attitude Adjustment mechanism 1 includes a lower ba...
Embodiment 2
[0038] Example 2: Defining the initial power-on position of the implantation of the prostate flexible pin particle;
[0039] According to the apparatus described in Example 1, when the positive gland flexible pin is implanted with the parallel robot in the initial power-on position, the parallel post-oriented adjustment mechanism 1 is in the upper holder 1-6 to drive the flexible needle particle implantation mechanism 3 to maintain pitch, flip And the outer needle apparatus 3-6 in the flexible needle particle implanted mechanism 3 is in the position of the displacement sensor 3-17 contraction to zero, the inner needle device 3-9 is in the rear limit switch 3-10 Power location; translation 2-2 in ultrasound image navigation mechanism 2 is in the limit switch 2-8 position of the translational slider 2-8 at the rear end of the ultrasonic device base 2-1, while the ultrasonic displacement sensor 2-7 and smooth The adjustment distance of the block drive motor mounting end frame 2-9 is ...
Embodiment 3
[0040] Example 3: Primary germ flexible pin particle implanted parallel robot specific implementation principle: First, the patient is lying on the surgical bed with a stone cut position, and disinfecting and anesthesia to the genital position; the parallel posture adjustment mechanism 1 mid-base 1-1 is passed through the bolt Connect with the operating table or other robot, place the radioactive particles 125i in the preoperative sealing environment and insert into the particle implant 3-6-9, by adjusting the parallel post stance adjustment mechanism 1 to make the flexible needle particle implant mechanism 3 The outer needle bracket 3-3 reaches the Yin Yin, and adjust the translational slider 2-2 to enter the ultrasound probe into the anus, complete the preoperative preparation; then, through control translational slider 2-2 and ultrasound Probe fixture 2-6 Pitch, yaw, rotary and other posture makes ultrasonic probes 2-6-9 to obtain a series of prostate diaphragm images in the pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More