

Device and method for non-contact measurement and non-contact control over vibration of flexible cantilever beam
A flexible cantilever, non-contact technology, used in measuring devices, non-electric variable control, mechanical oscillation control and other directions, can solve the problems of high cost, can only measure the displacement of a certain point on the object, and difficult to operate. wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further explained below through specific embodiments and accompanying drawings, but the embodiments of the present invention are not limited thereto.
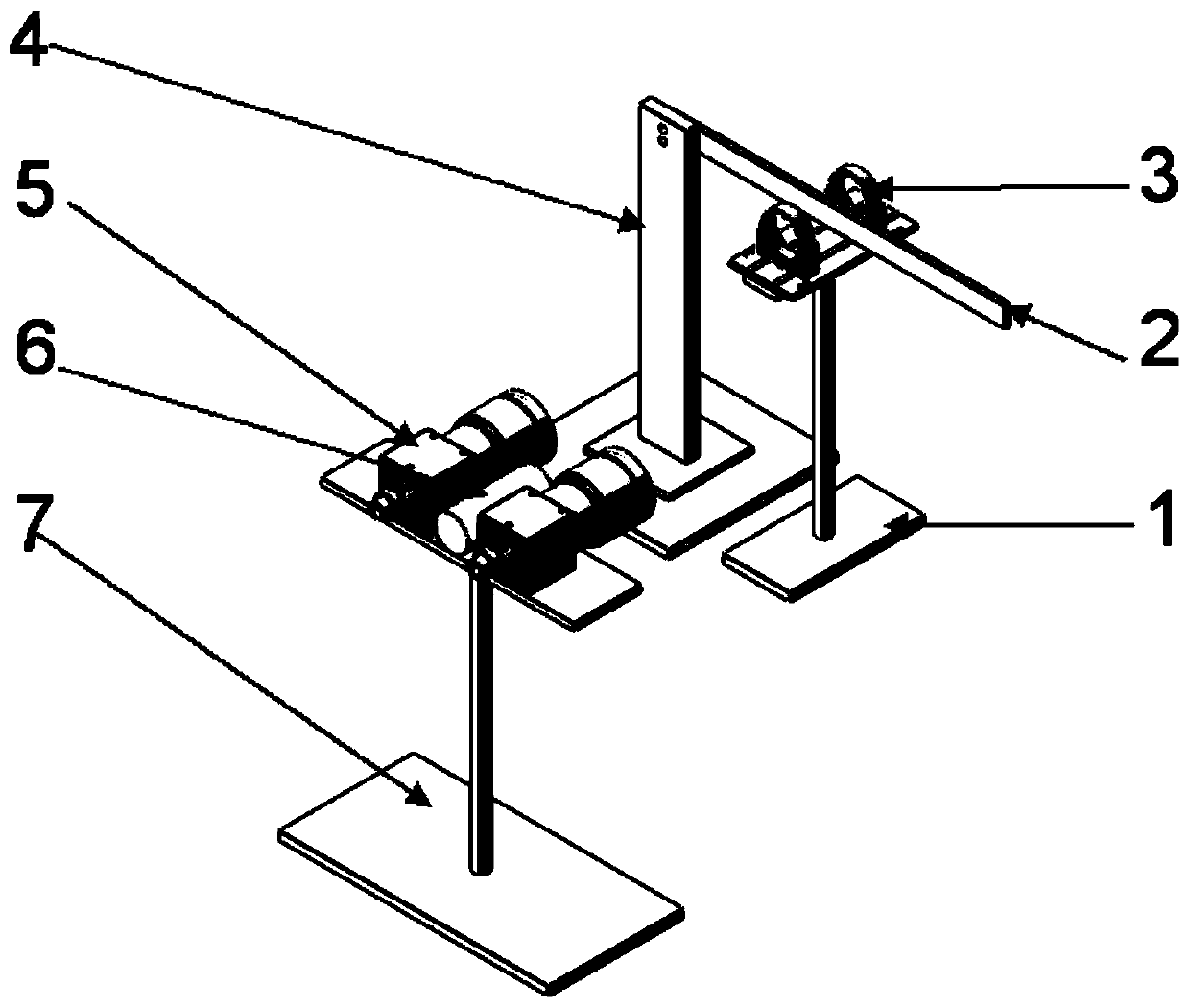
[0016] Such as figure 1 As shown, a device for non-contact vibration measurement and non-contact control of a flexible cantilever beam includes a cantilever beam 1, one end of the flexible cantilever beam 2 is fixed by a cantilever beam bracket 4, called a fixed end, and the other end is a free The electromagnetic coil 2 is symmetrically located on both sides of the flexible cantilever beam 2, and the electromagnetic coil is fixed by the coil bracket 1. The binocular CCD camera 5 is composed of two industrial cameras, which are located at the same level as the flexible cantilever beam 2. The optical axis of the eye CCD camera 5 is perpendicular to the flexible cantilever beam 2, the laser pointer 6 is located between the binocular CCD cameras, and the laser pointer 6 and the binocular camera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More