

Multi-industrial robot synergic welding control method
An industrial robot, industrial control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of long processing cycle of parts, large labor and time consumption, poor welding quality stability, etc., to improve the level of intelligence, improve Welding efficiency, the effect of liberating labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
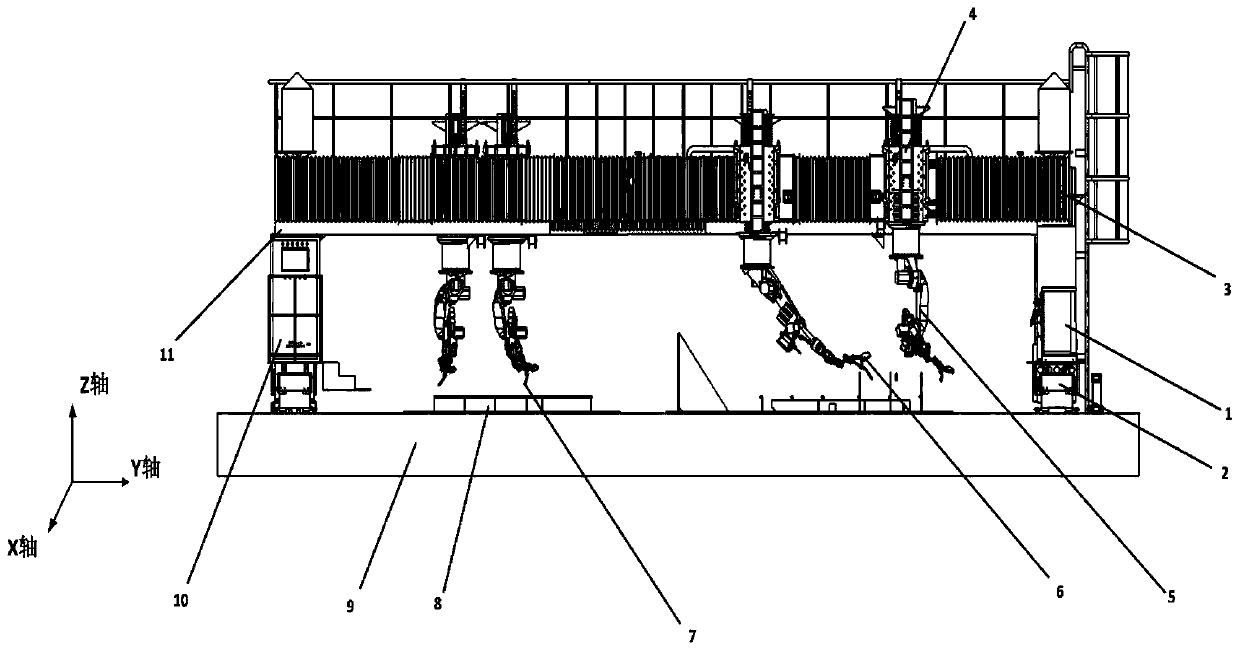
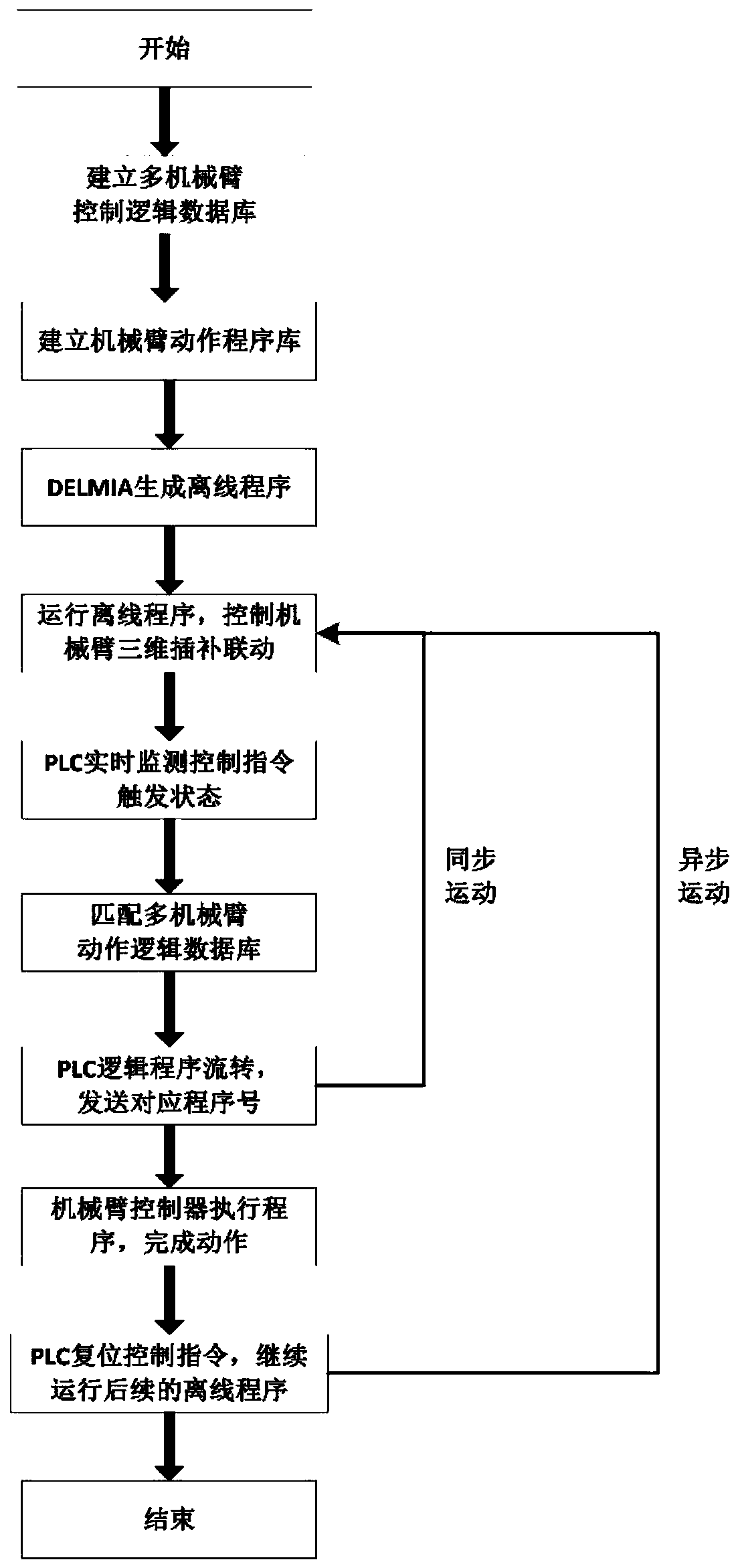
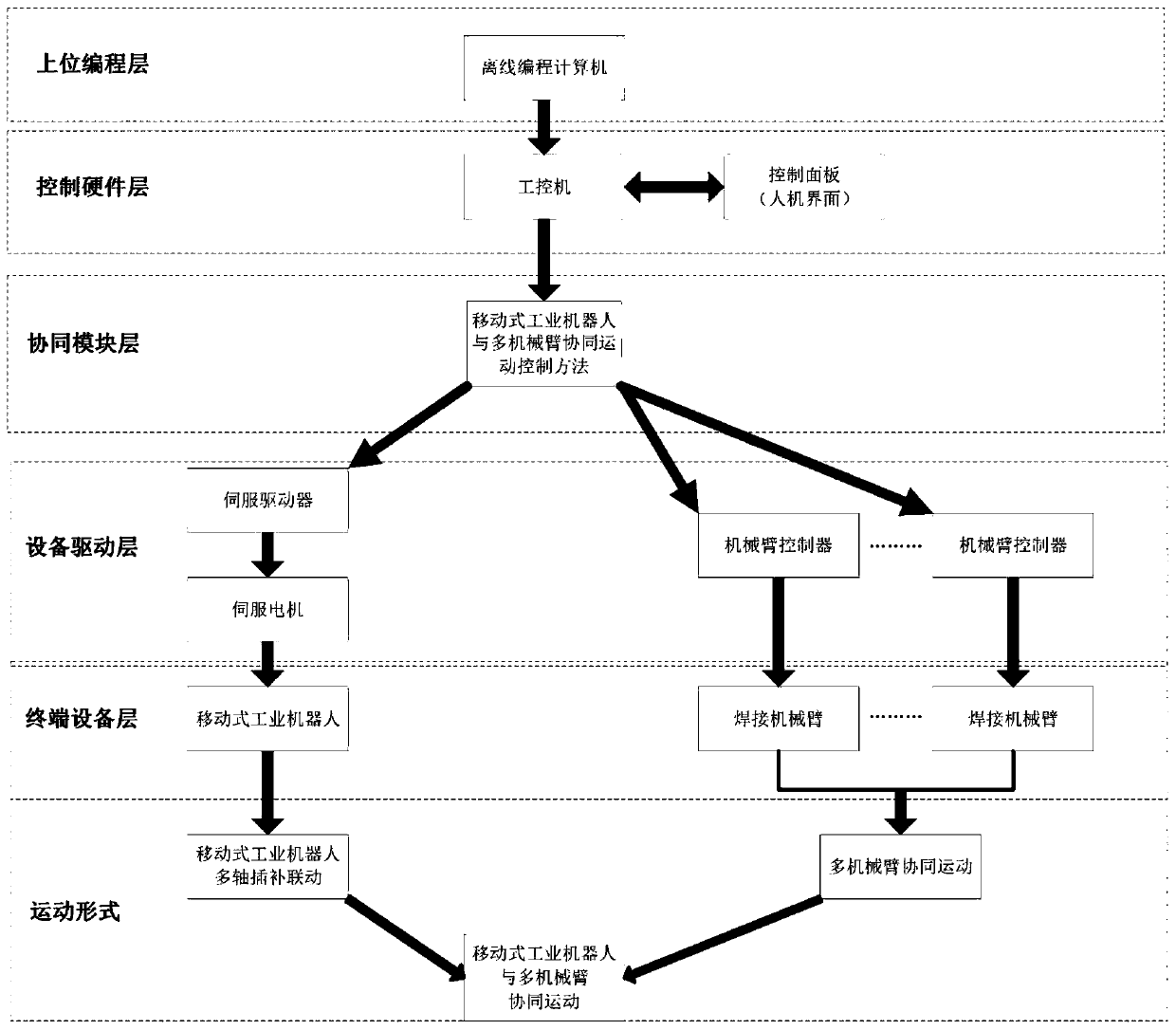
[0026] see figure 1 — image 3, the hardware equipment used in the present invention includes a mechanical arm controller, a mobile industrial robot X guide rail, a mobile industrial robot Y beam, a mobile industrial robot Z ram saddle, a welding robot arm, and a welding seam tracking visual device , Welding equipment, workpieces to be welded, welding workbench, industrial control computer, mobile industrial robot gantry. Among them, the origin of the world coordinate system of the entire device is located after all the servo motors return to absolute zero, and after the robot arm closest to the industrial control cabinet returns to its own HOME attitude, the origin of the tool coordinate system of the robot arm, the X direction of the world coordinate system It is along the guide rail direction of the base of the mobile industrial robot, the Y direction of the world coordinate system is along the direction of the beam of the mobile industrial robot, and the Z direction of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More