

Unmanned aerial vehicle real-time tracking and rapid countermeasure integrated control system and method
A technology of real-time tracking and control method, applied in the direction of electrical components, interference to communication, etc., can solve the problems of inconvenient transportation and installation, inability to achieve tracking and countermeasures, short duration of frequency hopping, etc., to achieve easy disassembly and Transportation and installation, reducing the impact of electromagnetic environment, the effect of long distance of power action
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
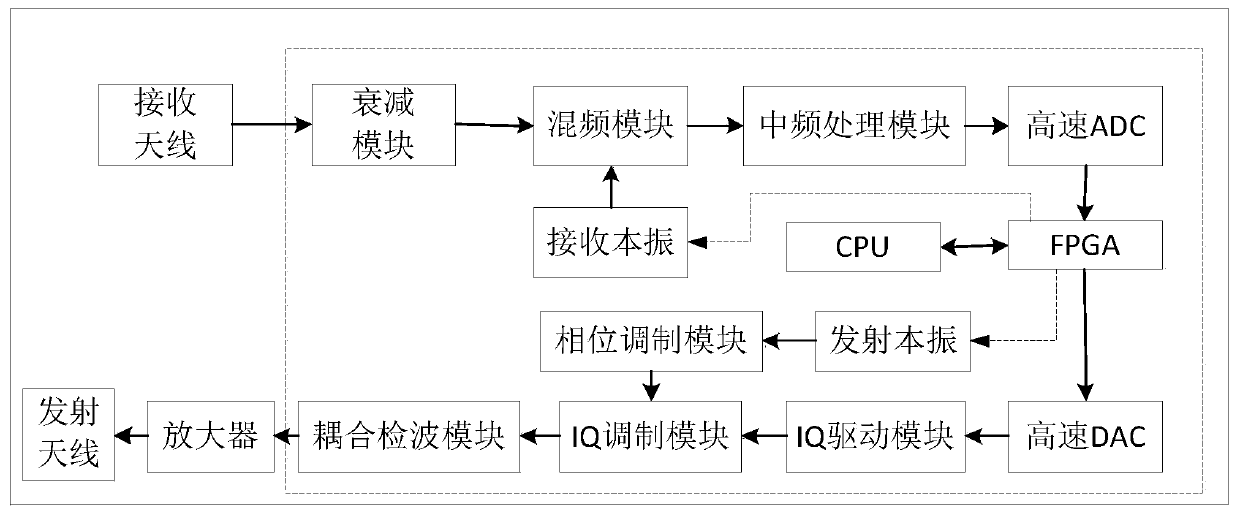
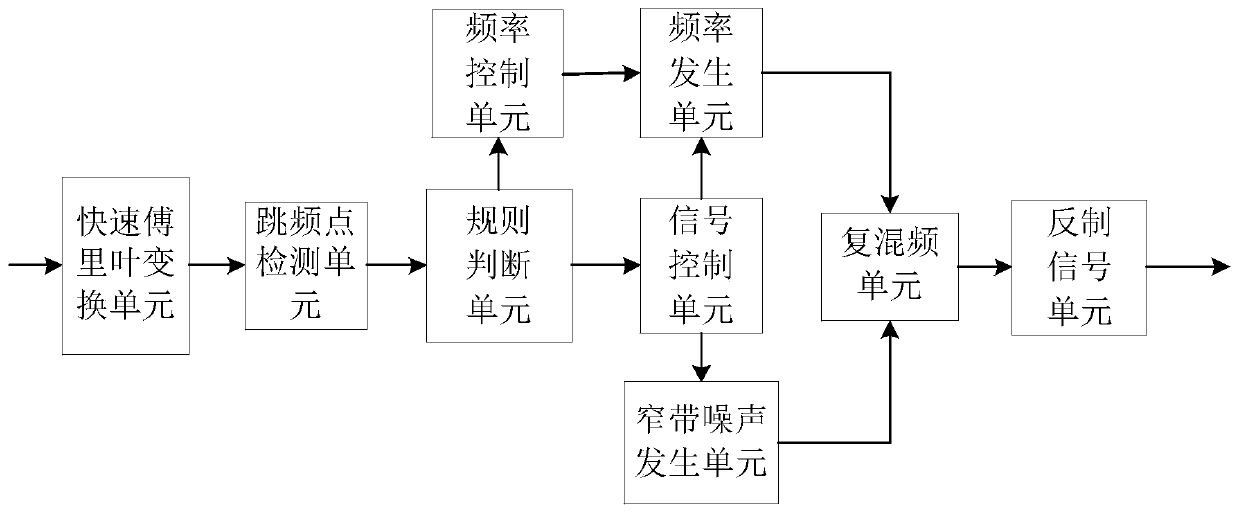
[0033] The invention provides an integrated control system and method for real-time tracking and rapid countermeasures of unmanned aerial vehicles, such as figure 1 and figure 2 As shown, the system and method use a field programmable gate array to realize an efficient digital signal algorithm, which can track the UAV signal in real time and countermeasure it. It only needs to transmit a narrow-band interference signal, which can increase the countermeasure range and avoid Interference is caused to adjacent frequency bands and the next frequency hopping point.
[0034] The specific method is as follows:
[0035] 1. After the radio signal of the UAV enters the RF front end through the receiving antenna, it becomes a baseband signal with a center frequency of 153.6MHz and a b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More