Output adjusting method of switching networked flight control system based on alternating event triggering
A technology of event triggering and output regulation, applied in special data processing applications, instruments, electrical digital data processing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0134] In this embodiment, take the F-18 aircraft developed by McDonnell-Douglas as the research object. F-18 is a carrier-based jet propulsion multi-purpose combat aircraft. Performance is the mainstream aircraft of the U.S. Navy. During the entire flight process, the initial stage of the longitudinal movement of the aircraft is mainly short-term movement. Due to its short period and rapid change, the pilot does not have enough time to take corrective measures. Therefore, the vertical short period Movement has a great influence on flight safety and shooting accuracy, especially in the study of F-18 aircraft; the nonlinear dynamic model of F-18 aircraft is as follows
[0135]
[0136] Among them, α and q represent the angle of attack and pitch rate, m represents the mass of the aircraft, and Indicates the aircraft dynamic pressure along the OX axis component and the average geometric chord, S indicates the wing area, U 1 and θ 1 represent the aircraft velocity along th...
Embodiment 2
[0148] By designing an alternate event-triggered mechanism and based on the control input δ E and δ PTV Based on the controller of the event-triggered mechanism, the output regulation problem of the networked flight control system is transformed into the output regulation problem of the networked switching system;
[0149] The construction of the alternate event triggering mechanism is specifically:
[0150] S21. In order to study the output adjustment problem of the flight control system based on the network switching control based on the event trigger mechanism, the following assumptions are given:
[0151] Assumption 1. Under the switching signal σ(t), the switching sequence of the flight control system based on networked switching control is expressed as where t k is the switching time, at this time the system mode changes from switch to σ(t k )=i≠j, i,j∈M;
[0152] Assumption 2. The event-triggered transmission sequence satisfying the event-triggered communication...
Embodiment 3
[0167] The error feedback controller based on the alternate event trigger control is specifically:
[0168]
[0169] Among them, H σ(t) and E σ(t) represents a constant matrix of appropriate dimensionality, represents the controller gain to be designed, ξ(t) represents the internal state of the controller, Indicates the switching signal of the controller, d 0 = 0, d k Indicates the controller u i (mode is i) lagging behind the delay of the corresponding subsystem i, that is 0≤d k Mi , d Mi Indicates the controller u i maximum lag time.
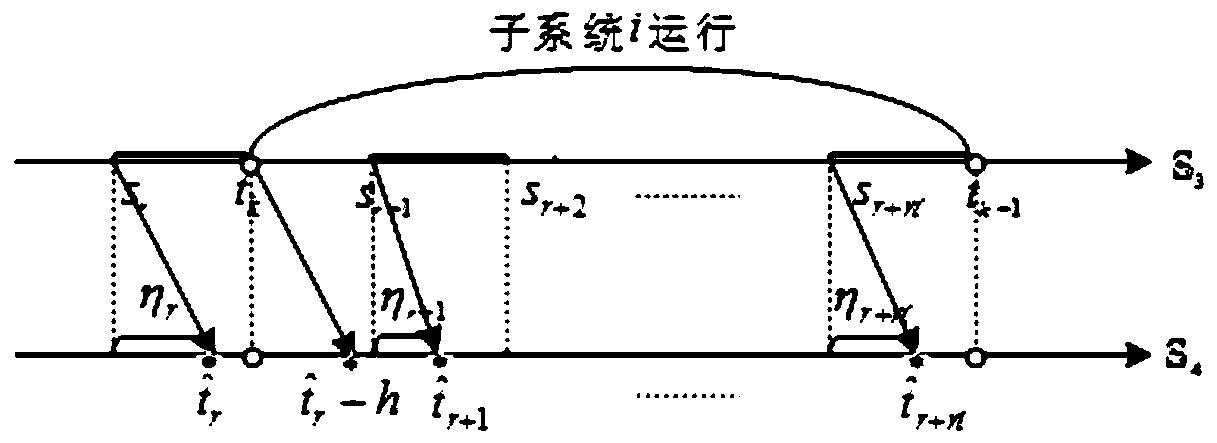
[0170] Such as image 3 As shown, since the alternate event trigger mechanism and the asynchronous switching signal cooperate with each other, the specific form of the error feedback controller is discussed in the following four cases:
[0171] Case 1, when , according to the alternate event trigger mechanism (2), the sensor is in the waiting phase during this time period; if , the sensor waiting time is h; if When , t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More