Modular three-degree-of-freedom machining robot
A degree of freedom and modular technology, applied in the field of robotics, can solve the problems of high control difficulty, poor repeat positioning accuracy, small work space, etc., and achieve the effect of simple control system, high versatility, and easy maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
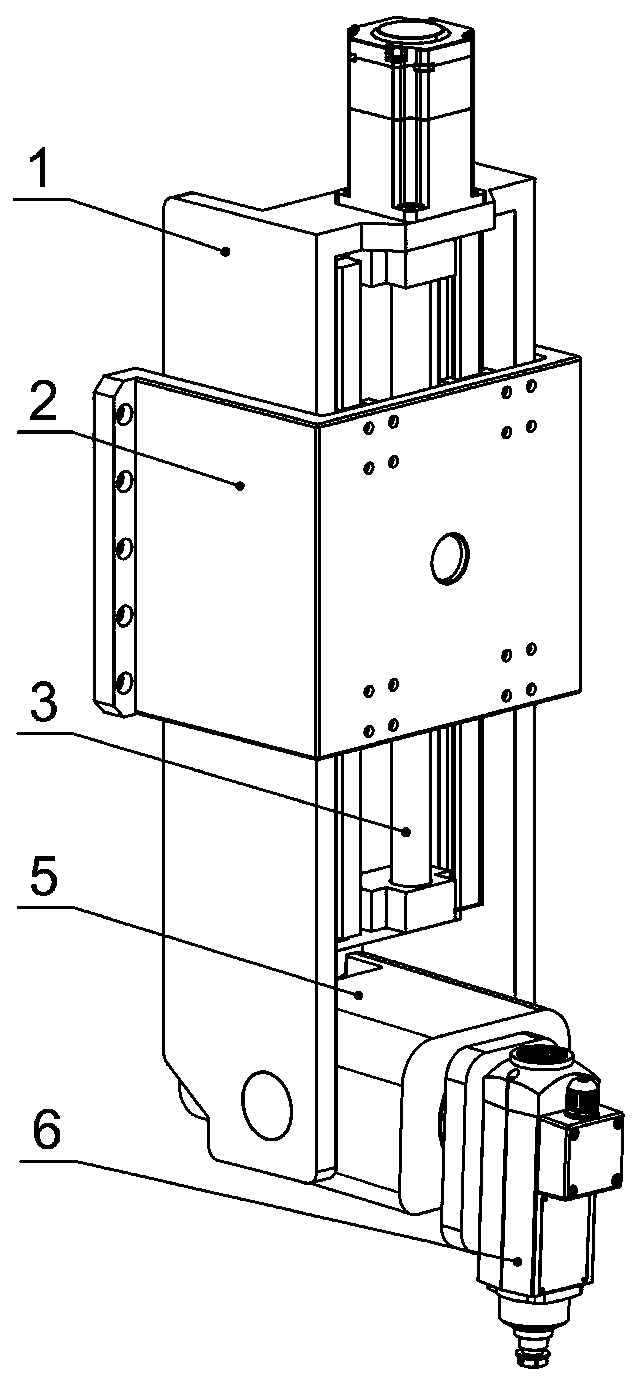
[0050] Such as figure 1 A modular three-degree-of-freedom processing robot is shown, which includes a mounting plate 1, a fixed mounting base 2, a first linear drive unit 3, a second linear drive unit 4, an end effector attitude adjustment mechanism 5, an end effector Component 6. Wherein the mounting plate is H-shaped, and the fixed mounting seat 2 is rectangular.
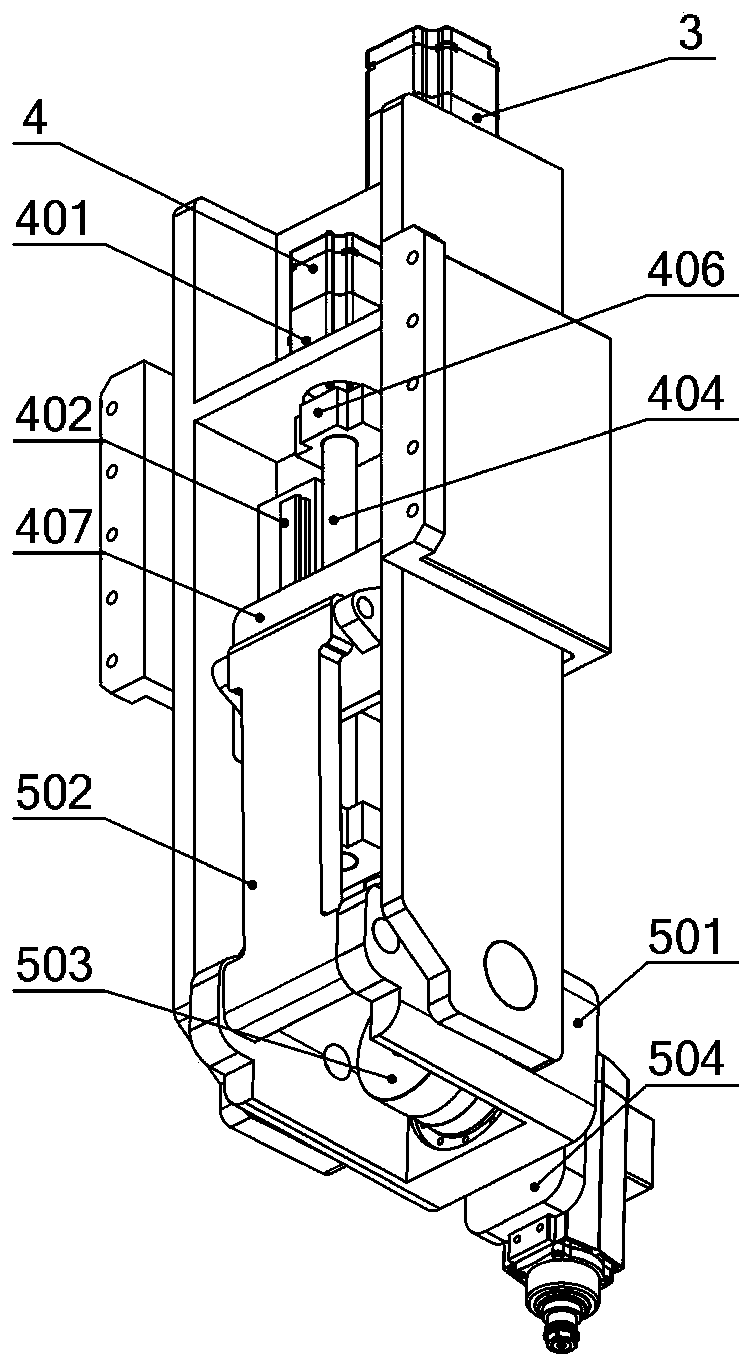
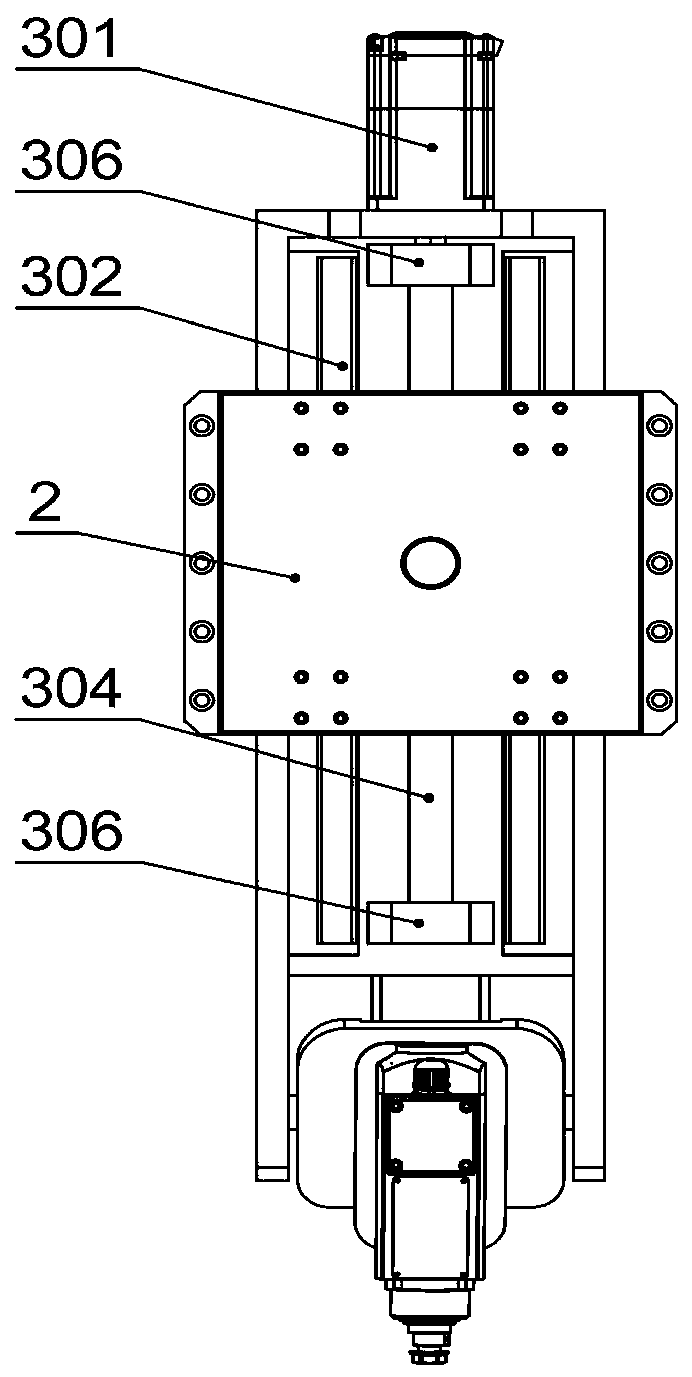
[0051] The mounting plate 1 includes a web 101, two ribs 102, a first motor mounting plate 103, and a second motor mounting plate 104, and the first driving linear unit 3 includes a first motor 301, a first guide rail 302, and a first slider 303 , the first lead screw 304 , the first screw nut 305 and the first lead screw support seat 306 . The second linear drive unit 4 includes a second motor 401, a second guide rail 402, a second slider 403, a second lead screw 404, a second screw nut 405, a second lead screw support seat 406 and a slide plate 407; The attitude mechanism 5 includes an attitude adjustment fra...
specific Embodiment 2
[0060] The second linear drive unit 4 in the modular three-degree-of-freedom processing robot in the present invention, such as Figure 7 As shown, the second motor 401 and the second lead screw 404 in the second linear drive unit 4 can be replaced by a drive cylinder 408, the cylinder barrel of the drive cylinder 408 is connected with the upper part of the second end surface of the web 101 in the mounting plate 1, and the drive cylinder 408 protruding rod is connected with slide plate 407. The slide plate 407 is connected with the end effector attitude adjustment mechanism 5 through the connecting rod 502, and the drive cylinder 408 extends out to push the slide plate 407, so that the end effector 6 rotates on the A axis.
[0061] Similarly, the first motor can also be the first driving cylinder, the first lead screw is the extension shaft of the first driving cylinder, the cylinder barrel of the first driving cylinder is connected with the upper part of the first end surface...
specific Embodiment 3
[0064] In the present invention, the modular three-degree-of-freedom processing robot can be connected to the gantry machine tool 7 through the fixed mounting base 2, so that the end actuator 6 can realize three degrees of freedom of movement and two degrees of freedom of rotation, and meet the processing requirements for complex workpieces.
[0065] Other components are connected in the same way as in Example 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com