Prediction-function-based variable-domain fuzzy PI control method of alternating current servo motor
A technology of AC servo motor and predictive function control, applied in electric controllers, controllers with specific characteristics, etc., can solve problems such as difficulty in fuzzy control rule design and insufficient control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
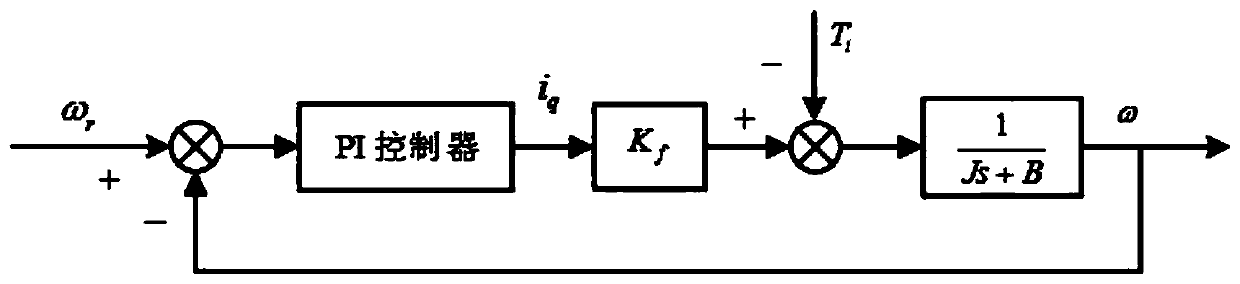
[0100] A variable universe fuzzy PI control method for AC servo motors based on predictive functions, in which the AC servo motor speed control system based on PI control strategy adopts such as figure 2 With the control structure shown, the motor is equivalent to the first-order transfer function In the figure ω r is the input command speed, ω is the feedback speed, i q is the q-axis command current, K f is the torque coefficient, J is the moment of inertia of the motor, B is the viscous friction coefficient, T l is the load disturbance including load torque, friction torque and cogging torque. Although the AC servo motor speed control system is a typical nonlinear complex system, it can be linearized without affecting the control effect. In this embodiment, the AC servo motor speed control system is described by a first-order autoregressive model (ARX):
[0101] ω(t)=aω(t-1)+bi q (t-1) (12)
[0102] In formula (12), a and b are model parameters to be identified. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



