

Gantry type three-axis welding device capable of automatically identifying weld joint track and welding method of gantry type three-axis welding device
An automatic identification and welding device technology, applied in auxiliary devices, welding equipment, auxiliary welding equipment, etc., can solve the problems of low welding accuracy, difficulty in further improving welding efficiency, and workpiece installation errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0096] The detailed content of the present invention and its specific implementation will be further described below in conjunction with the accompanying drawings.
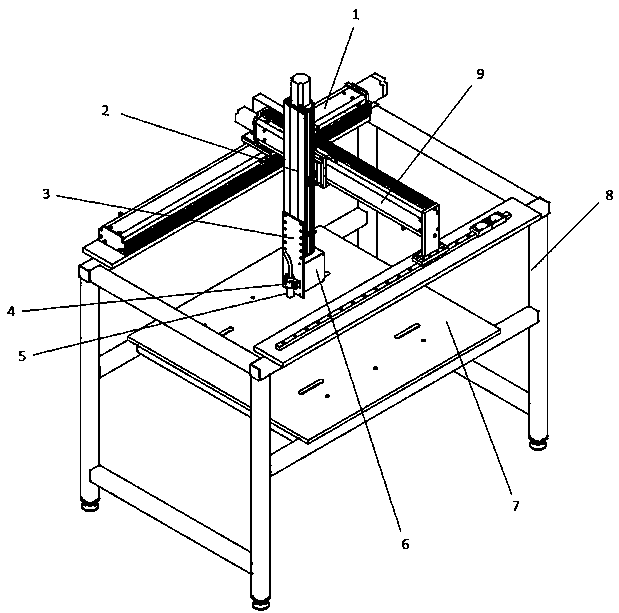
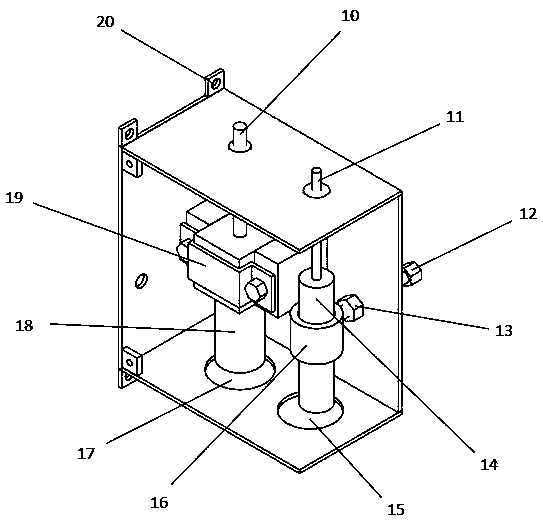
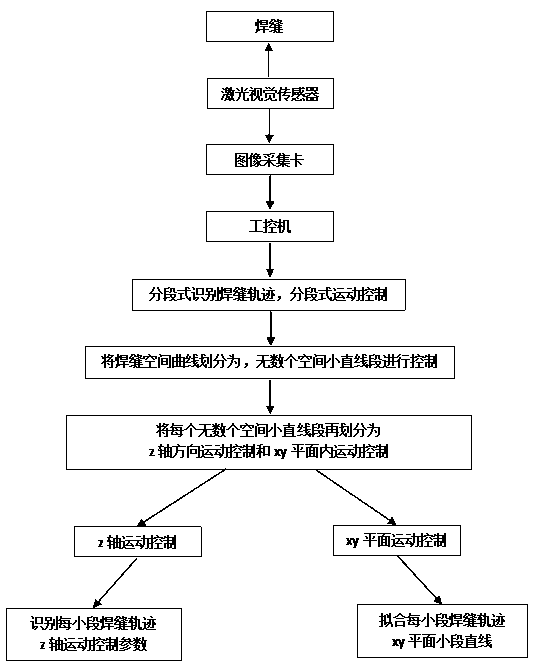
[0097] see Figure 1 to Figure 5 , the gantry-type three-axis welding device and welding method for automatic identification of welding seam track of the present invention, including industrial computer, gantry-type three-axis welding platform, laser vision sensor, image acquisition card, welding torch, welding machine, control cabinet; the invention provides A method for automatic identification of weld trajectory, under the moving relative coordinate system, fits the weld trajectory in segments; the pixel coordinates of the center points of each groove in the latter segment of the weld trajectory acquired by the laser vision sensor are compared with the previous segment , correct the fitting coordinate curve of the previous segment of the weld trajectory, and use it as the fitting coordinate curve of the subsequ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More