

Plant protection unmanned aerial vehicle cluster operation task allocation method and device
A technology of unmanned aircraft and distribution method, which is applied in the field of plant protection unmanned aircraft cluster operation task distribution, which can solve problems such as unreasonable task distribution, little consideration of coordination and cooperation between machines, take-off and landing conflicts, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment 1
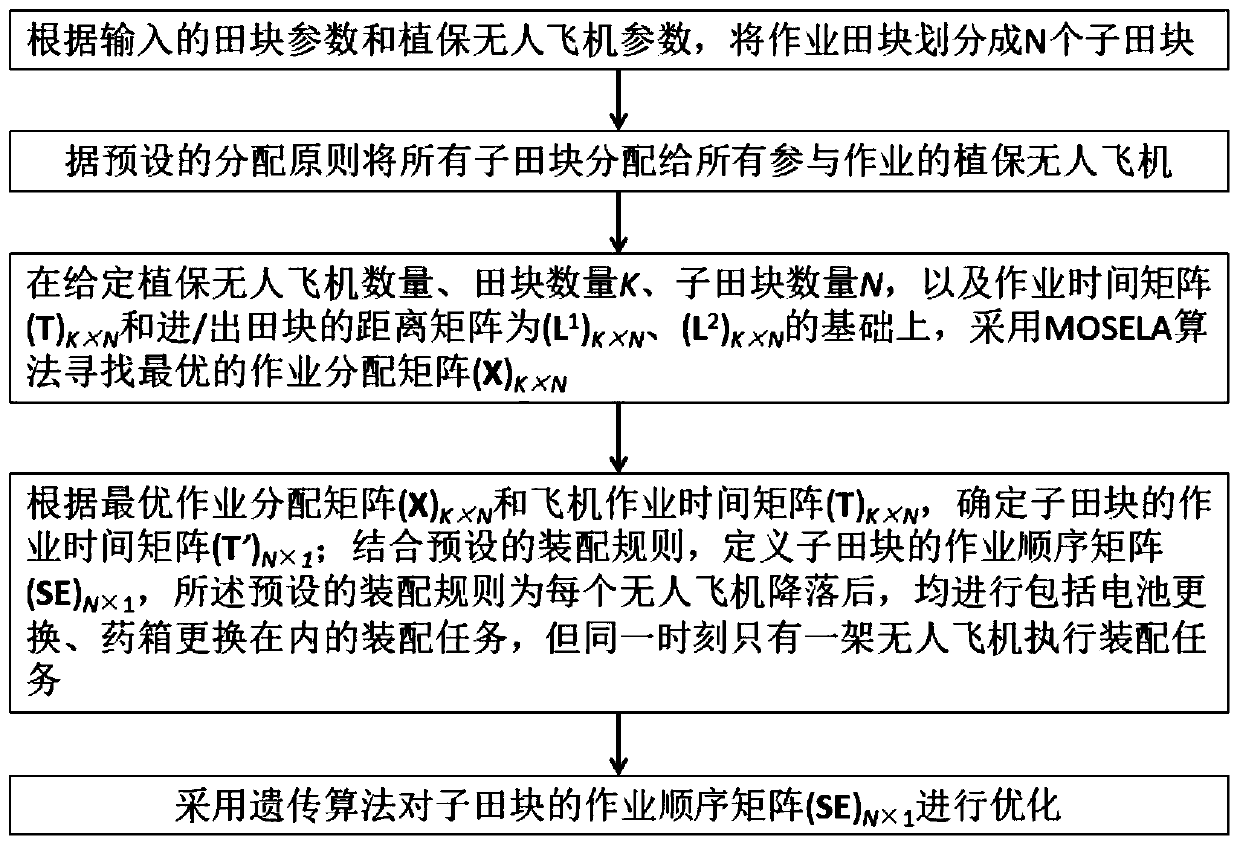
[0123] combine figure 1 , the present invention proposes a plant protection unmanned aircraft cluster operation task assignment method, the assignment method includes the following steps:
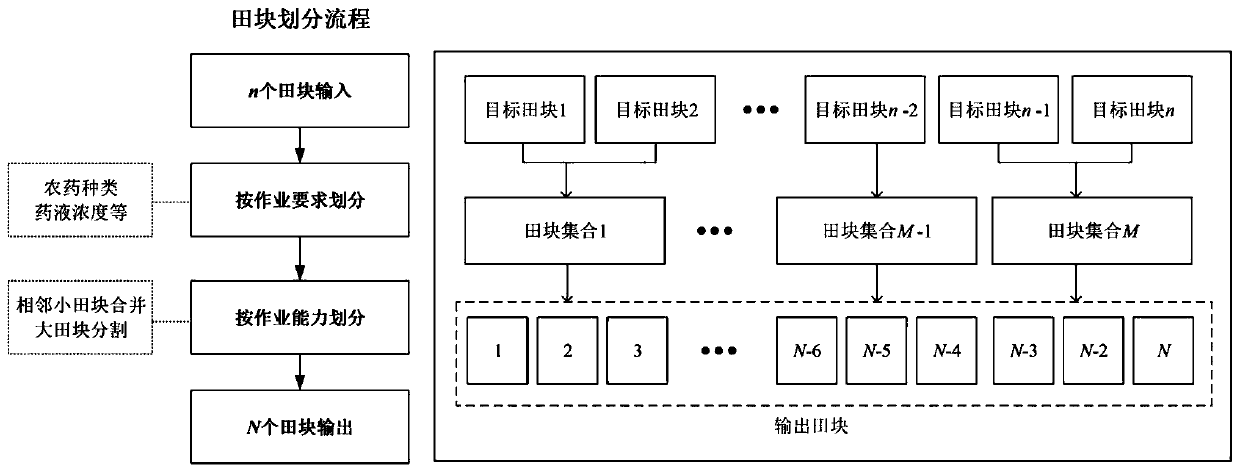
[0124] S1. According to the input field parameters and plant protection UAV parameters, the operation field is divided into N sub-fields. Each sub-field has the same operation requirements and only corresponds to one UAV. Define the set of N sub-fields as h j , j=1,2,3,...,N.
[0125] S2. Allocate all the subfields to all the plant protection UAVs participating in the operation according to the preset allocation principle, the preset allocation principle is: a single plant protection UAV is assigned at least one subfield, each subfield Can only be allocated once and all subfields are allocated.
[0126] S3, given the number of plant protection UAVs, the number of fields K, the number of sub-fields N, and the operating time matrix (T) K×N and the distance matrix into / out of the field is ...
specific Embodiment 2
[0199] combine Figure 9 , based on the aforementioned distribution method, the present invention also refers to a plant protection unmanned aircraft cluster operation task distribution device, the distribution device includes an ARM embedded system, and a GPS positioning system, a temperature and humidity sensor, Data transmission module, power module, LCD touch screen and cache module.
[0200] The temperature and humidity sensor is used to detect the real-time temperature and real-time humidity of the working area, and the detection result is fed back to the ARM embedded system.
[0201] The LCD touch screen is used to input field parameters and plant protection unmanned aircraft parameters to the ARM embedded system, and the field parameters include the boundary coordinates of each field.
[0202] The ARM embedded system combines the input field parameters and plant protection unmanned aircraft parameters, as well as the environmental information fed back by the temperatu...
specific Embodiment 3
[0206]In order to determine the optimization performance of multiple plant protection unmanned aircraft operation planning based on the MOSFLA+GA collaborative task allocation algorithm, the present invention selects a target multi-field block with a total area of 330 mu as follows Figure 10 and 11 shown.
[0207] The selected plant protection UAV has a maximum endurance time of 25 minutes and a drug load of 15L. Based on drones Figure 10 The multi-field block is re-divided, and the result of the division is as follows Figure 11 shown. The area of the 22 sub-fields divided is ≤15 mu, so as to ensure that the plant protection drone can complete the spraying operation in one sortie. The take-off / landing area of the unmanned aircraft is located near the center of the field. This area meets the requirements of easy take-off and liquid battery transportation. When multiple planes land at the same time, the maximum distance between the planes is 100m, so as to ensure t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More