Wheeled farmland management robot with flexible profiling chassis and profiling control method
A robot and chassis technology, applied in the field of agricultural machinery, which can solve problems such as staying away from crops, touching the ground or damaging seedlings
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] In order to clarify the technical scheme and working principle of the present invention, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
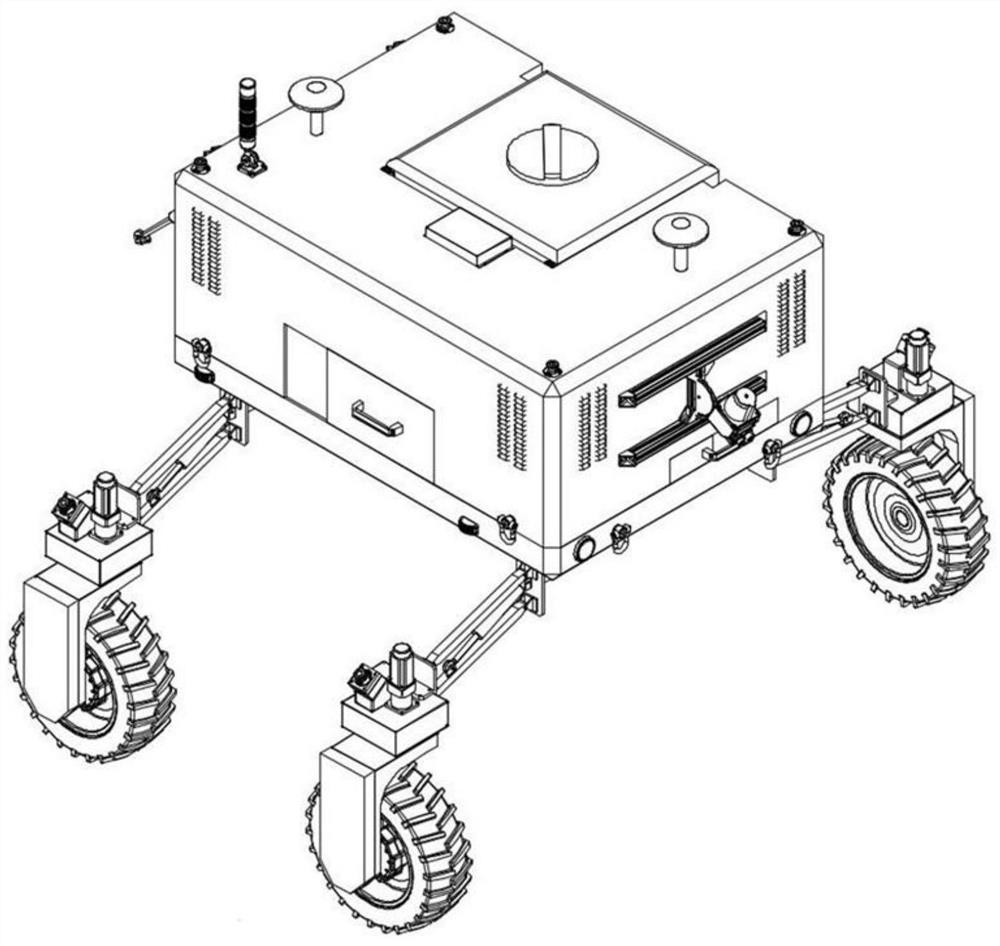
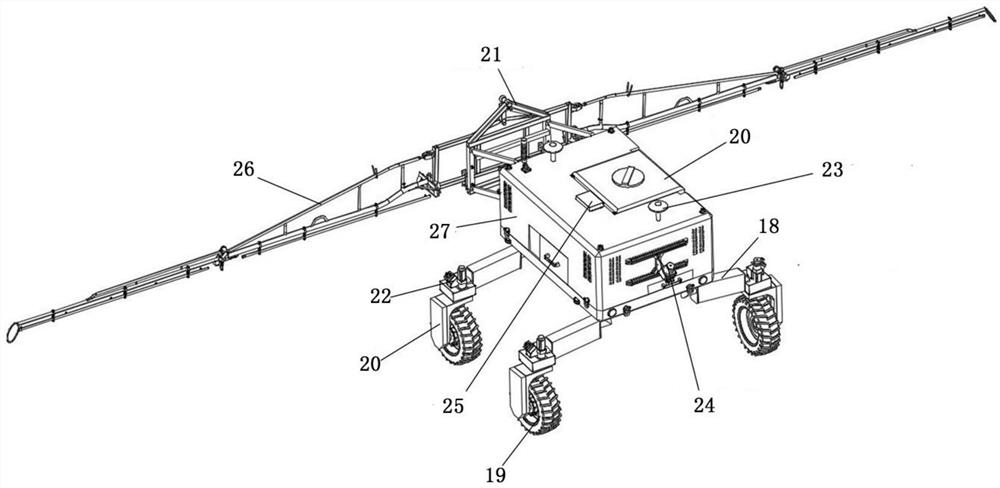
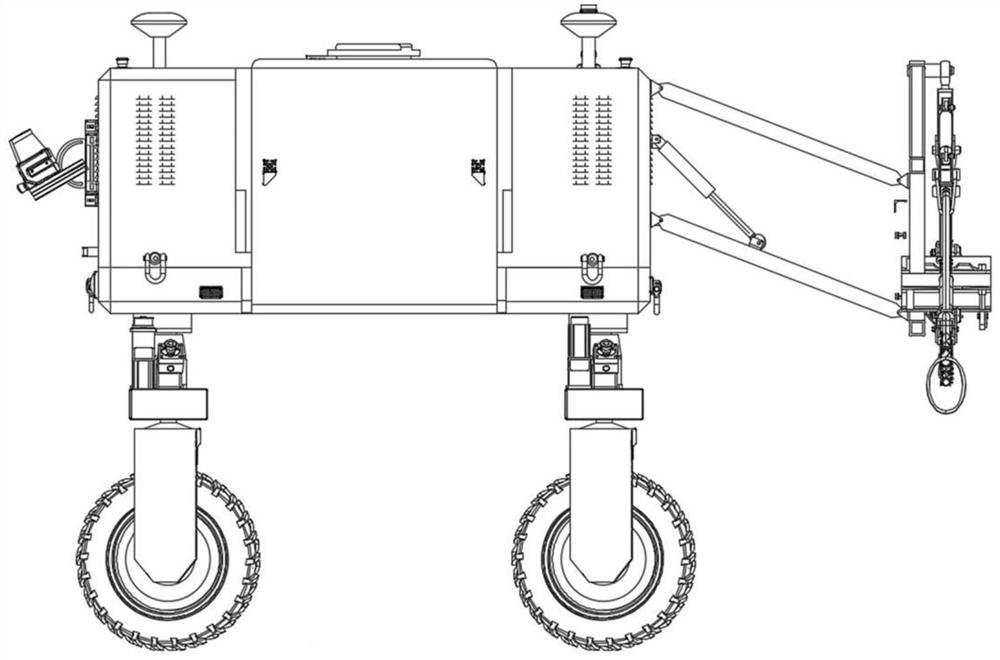
[0079] Such as figure 1 Shown is a wheeled farmland management robot with a flexible profiling chassis, including a body 27, a detection system, a control system, and four wheel-leg mechanisms that independently control steering. The detection system includes components such as a three-dimensional terrain detection sensor 24, a satellite positioning module (satellite antenna and receiver) 23, an inertial sensor 25, a non-contact distance sensor (preferably adopting an ultrasonic wave or a laser ranging sensor), and the control system includes CPU.
[0080] The three-dimensional terrain detection sensor 24 can use equipment such as laser radar or depth camera, and the present embodiment preferably adopts a three-dimensional laser radar sensor. Such as f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More