Drilling tool joint machine vision system and control method
A technology of drilling tool joints and control methods, which is applied in the direction of automatic drilling control systems, instruments, drill pipes, etc., can solve problems such as error-prone and low efficiency, and achieve the goal of reducing drilling costs, reducing manual operations, and reducing operating errors Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] In order to better explain the present invention and facilitate understanding, the present invention will be described in detail below through specific embodiments in conjunction with the accompanying drawings.
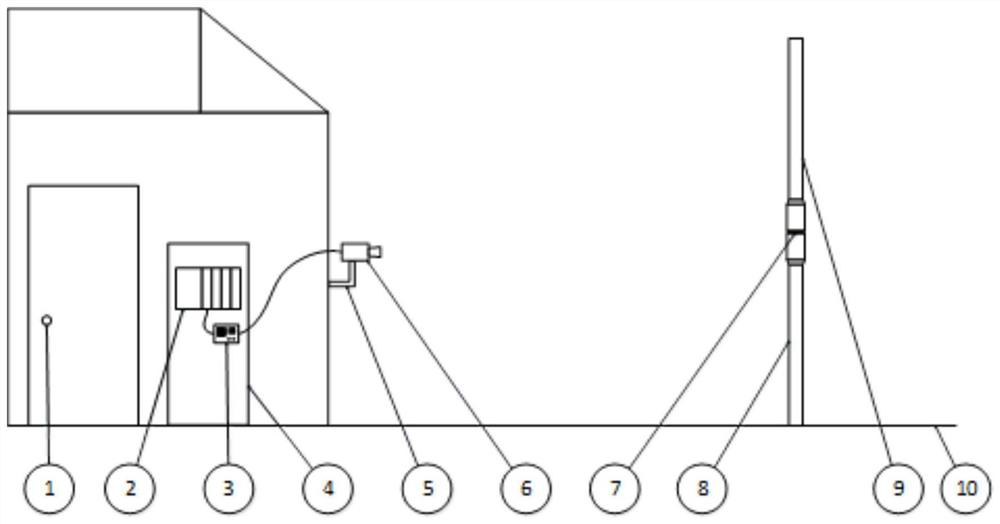
[0042] refer to Figure 1 to Figure 3 , the present embodiment provides a control method for drilling tool joint positioning, including the following steps:
[0043] S1: start the camera 6, take pictures of the drill joint 7, and record the image of the drill joint 7.
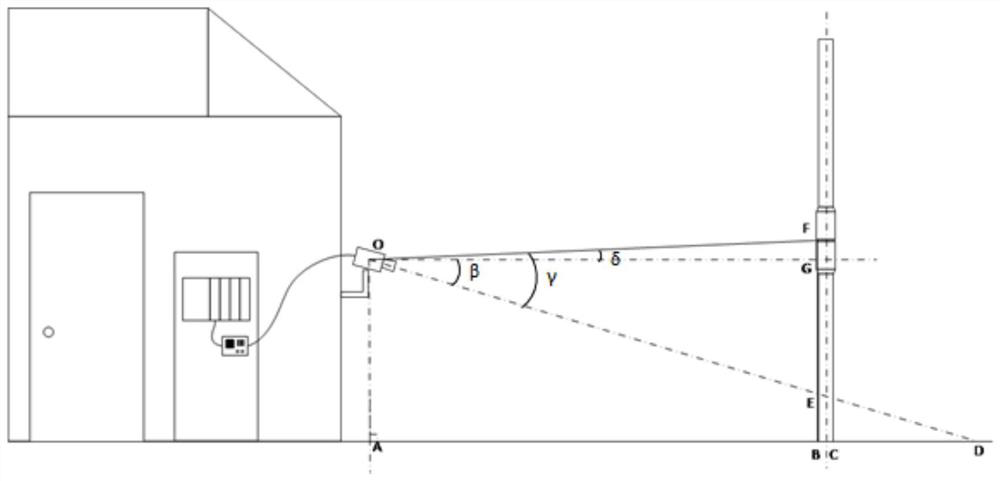
[0044] S2: The processor 3 electrically connected to the camera 6 is activated to receive the image of the drill joint 7 recorded by the camera 6 and obtain the visual angle α occupied by the drill joint 7 . According to the known horizontal distance L between the camera and the borehole axis 1 , the angle β between the camera and the horizontal plane, to obtain the radius and diameter information of the drilling tool.
[0045] S3: According to the radius information of the drill tool obtaine...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com