

Anti-interference compound control method of permanent magnet synchronous motor servo system based on backlash compensation
A permanent magnet synchronous motor and servo system technology, applied in the field of motion control and servo, can solve the problems of not considering the gear collision disturbance, system uncertainty, the method is limited to theoretical research, etc., to achieve strong robustness and fast response good universality and popularization, and the effect of improving anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0068] Embodiment: an anti-interference compound control method of a permanent magnet synchronous motor servo system based on backlash compensation, the method includes the following steps:
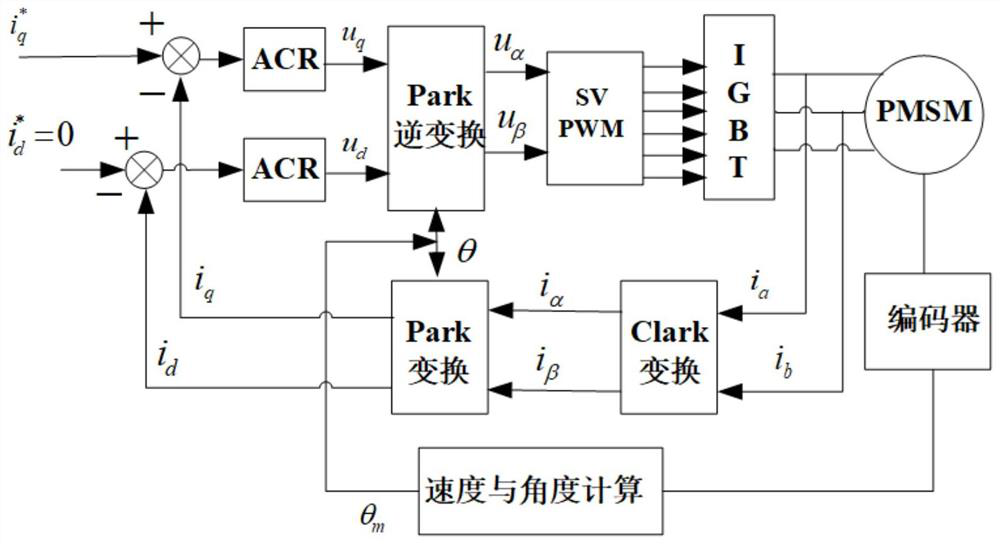
[0069] Step 1: Establish the current closed-loop system under the vector control of the permanent magnet synchronous motor;
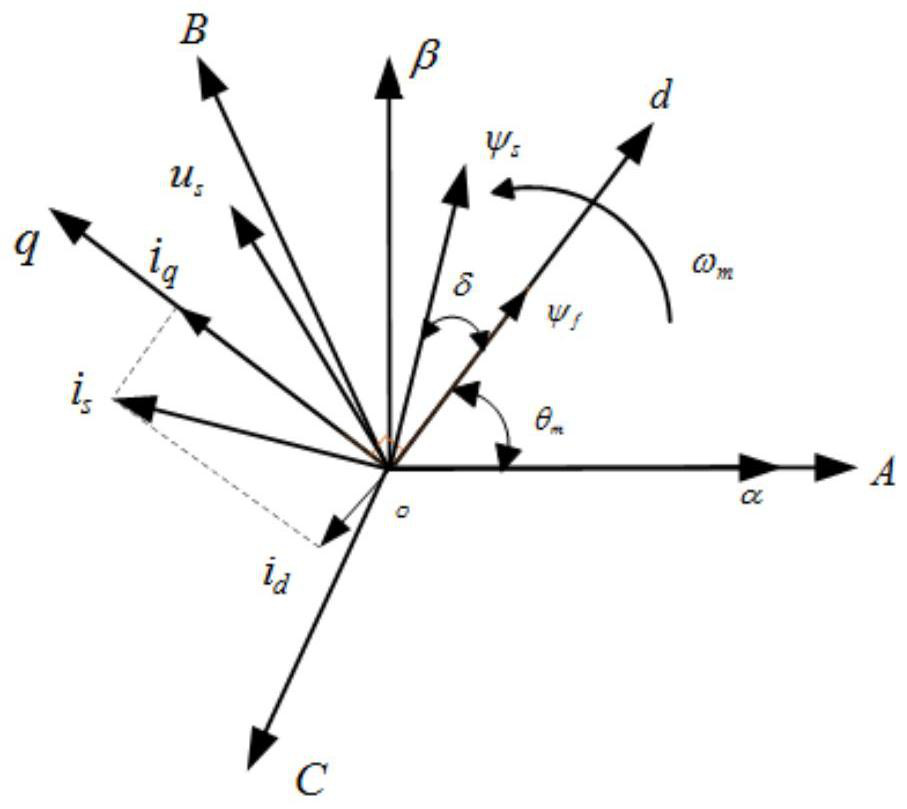
[0070] The permanent magnet synchronous motor vector control defines three coordinate systems, which are the stator A-B-C three-phase stationary coordinate system, the α-β two-phase stationary coordinate system, and the rotor d-q two-phase rotating coordinate system. Coordinate transformation can be performed between these three coordinate systems. The coordinates of the vector on the three-phase stationary coordinate system of the stator A-B-C are transformed into the coordinates of the α-β two-phase stationary coordinate system, which is called Clarke transformation; the vector is transformed in the α- The coordinate transformation in the β two-phase stationary c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More