

Vehicle detection method and system based on monocular vision and deep learning
A vehicle detection and deep learning technology, applied in the field of vehicle detection, can solve the problem that the 4G network bandwidth cannot meet the real-time transmission of high-quality video images, cannot predict and warn of primary accidents and secondary accidents, and cannot guarantee the real-time performance of vehicle speed measurement and distance measurement and other issues to achieve the effect of minimizing reprojection error, improving accuracy, and accurate real-time tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
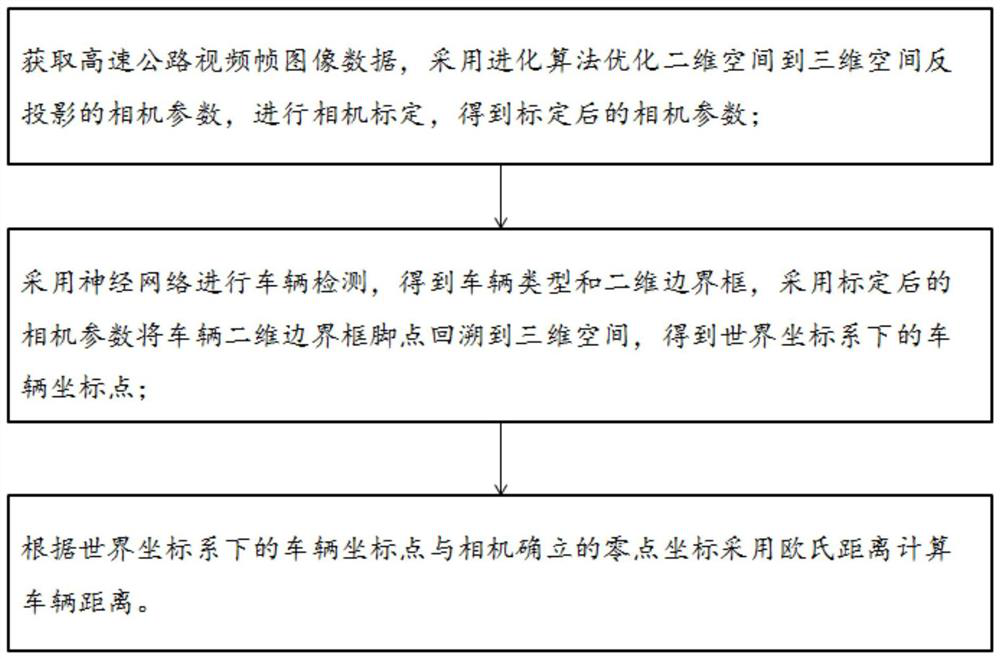
[0058] Such as figure 1 As shown, Embodiment 1 of the present invention provides a vehicle detection method based on monocular vision and deep learning, including the following process:
[0059] Obtain the video monitoring data of the expressway, optimize the camera parameters of the back projection from the two-dimensional space to the three-dimensional space by the evolutionary algorithm, carry out the calibration of the video monitoring camera of the expressway, and obtain the calibrated camera parameters;
[0060] Use the neural network for vehicle detection to obtain the vehicle type and two-dimensional bounding box, use the calibrated camera parameters to trace the foot of the two-dimensional bounding box of the vehicle back to the three-dimensional space, and obtain the vehicle coordinate point in the world coordinate system;
[0061] According to the vehicle coordinate point in the world coordinate system and the zero point coordinate established by the camera, the veh...
Embodiment 2
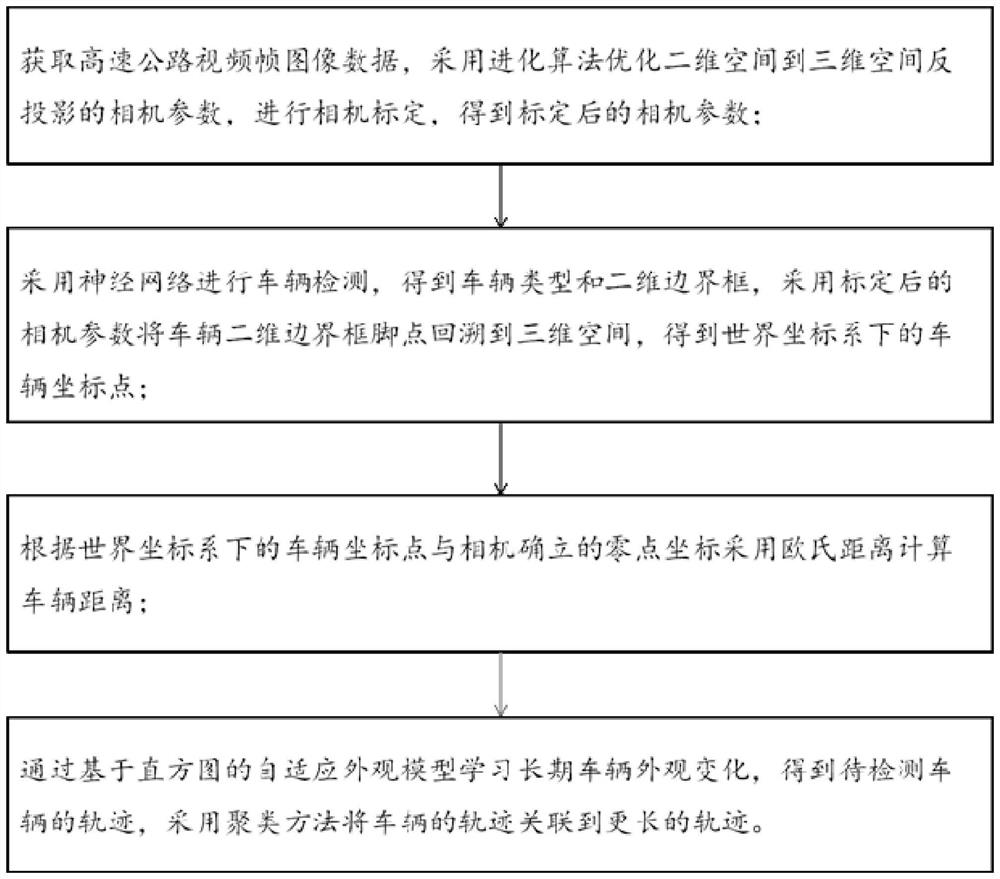
[0085] Such as figure 2 As shown, Embodiment 2 of the present invention provides a vehicle detection method based on monocular vision and deep learning, including the following process:
[0086] Obtain the video monitoring data of the expressway, optimize the camera parameters of the back projection from the two-dimensional space to the three-dimensional space by the evolutionary algorithm, carry out the calibration of the video monitoring camera of the expressway, and obtain the calibrated camera parameters;
[0087] Use the neural network for vehicle detection to obtain the vehicle type and two-dimensional bounding box, use the calibrated camera parameters to trace the foot of the two-dimensional bounding box of the vehicle back to the three-dimensional space, and obtain the vehicle coordinate point in the world coordinate system;
[0088] According to the vehicle coordinate point in the world coordinate system and the zero point coordinate established by the camera, the ve...
Embodiment 3
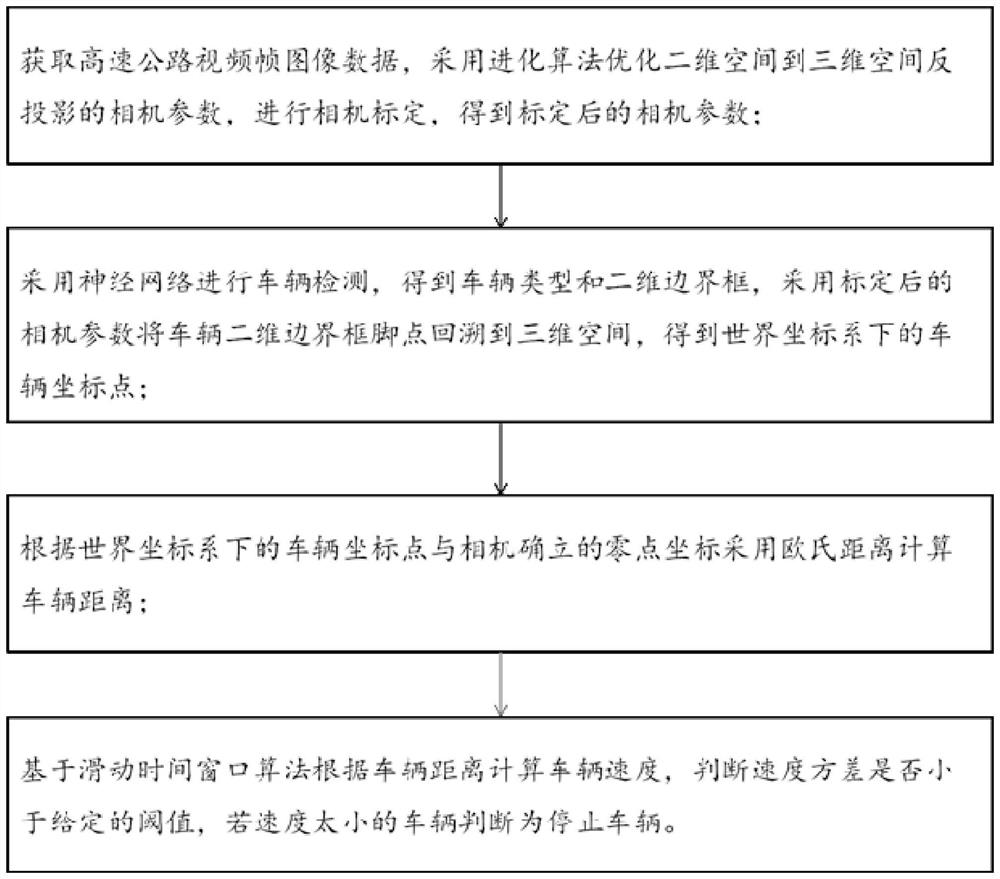
[0110] Such as image 3 As shown, Embodiment 3 of the present invention provides a vehicle detection method based on monocular vision and deep learning, including the following process:
[0111] Obtain the video monitoring data of the expressway, optimize the camera parameters of the back projection from the two-dimensional space to the three-dimensional space by the evolutionary algorithm, carry out the calibration of the video monitoring camera of the expressway, and obtain the calibrated camera parameters;
[0112] Use the neural network for vehicle detection to obtain the vehicle type and two-dimensional bounding box, use the calibrated camera parameters to trace the foot of the two-dimensional bounding box of the vehicle back to the three-dimensional space, and obtain the vehicle coordinate point in the world coordinate system;
[0113] According to the vehicle coordinate point in the world coordinate system and the zero point coordinate established by the camera, the veh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More