

Space four freedom mechanism for realizing three rotating and one moving
A technology with three degrees of freedom and three rotations, applied in the direction of manipulators, supporting machines, mechanical equipment, etc., can solve the problems of low angular attitude control accuracy, small working space, and poor dexterity, and achieve fast system response, large structural rigidity, and large load capacity effect of ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
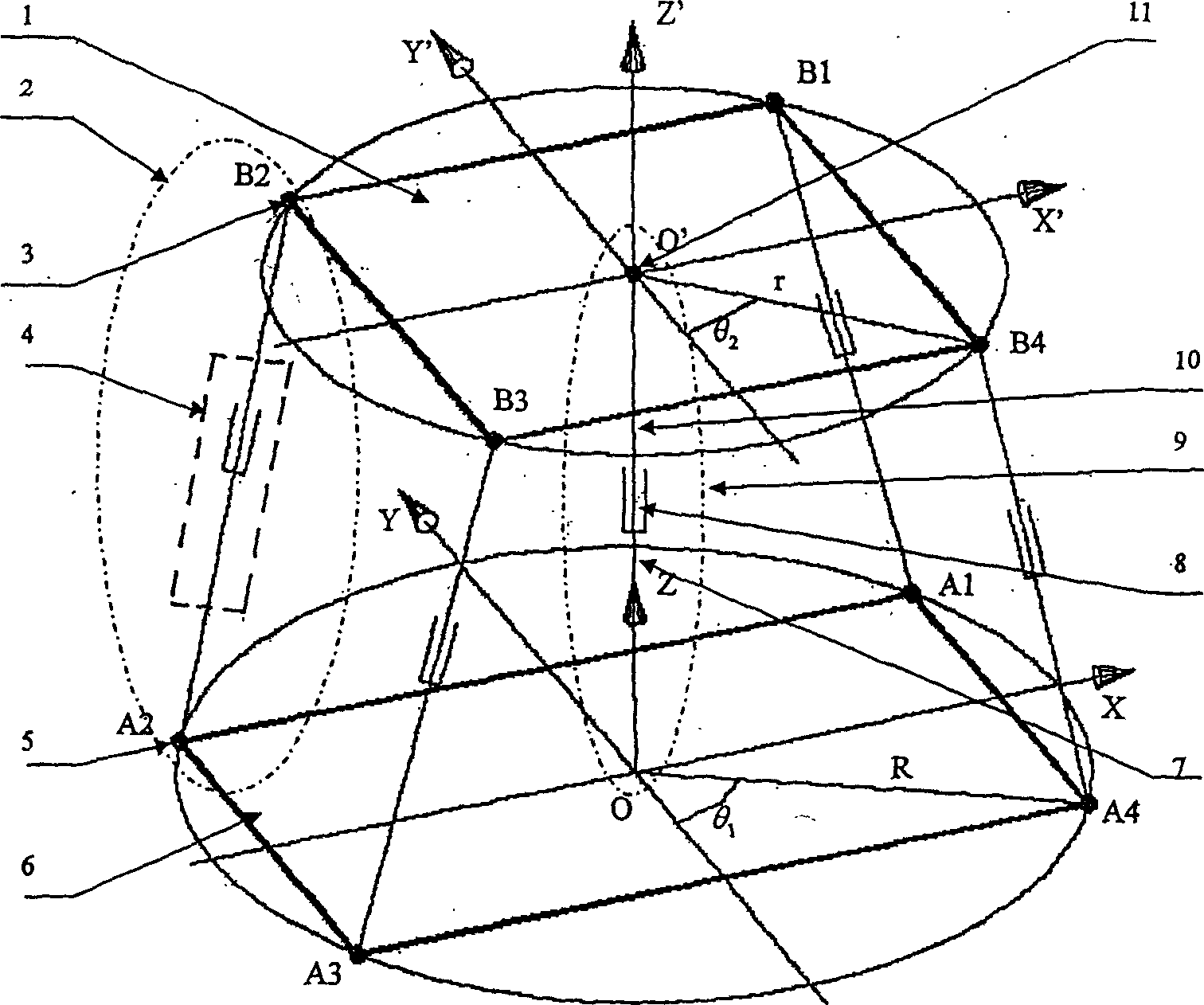
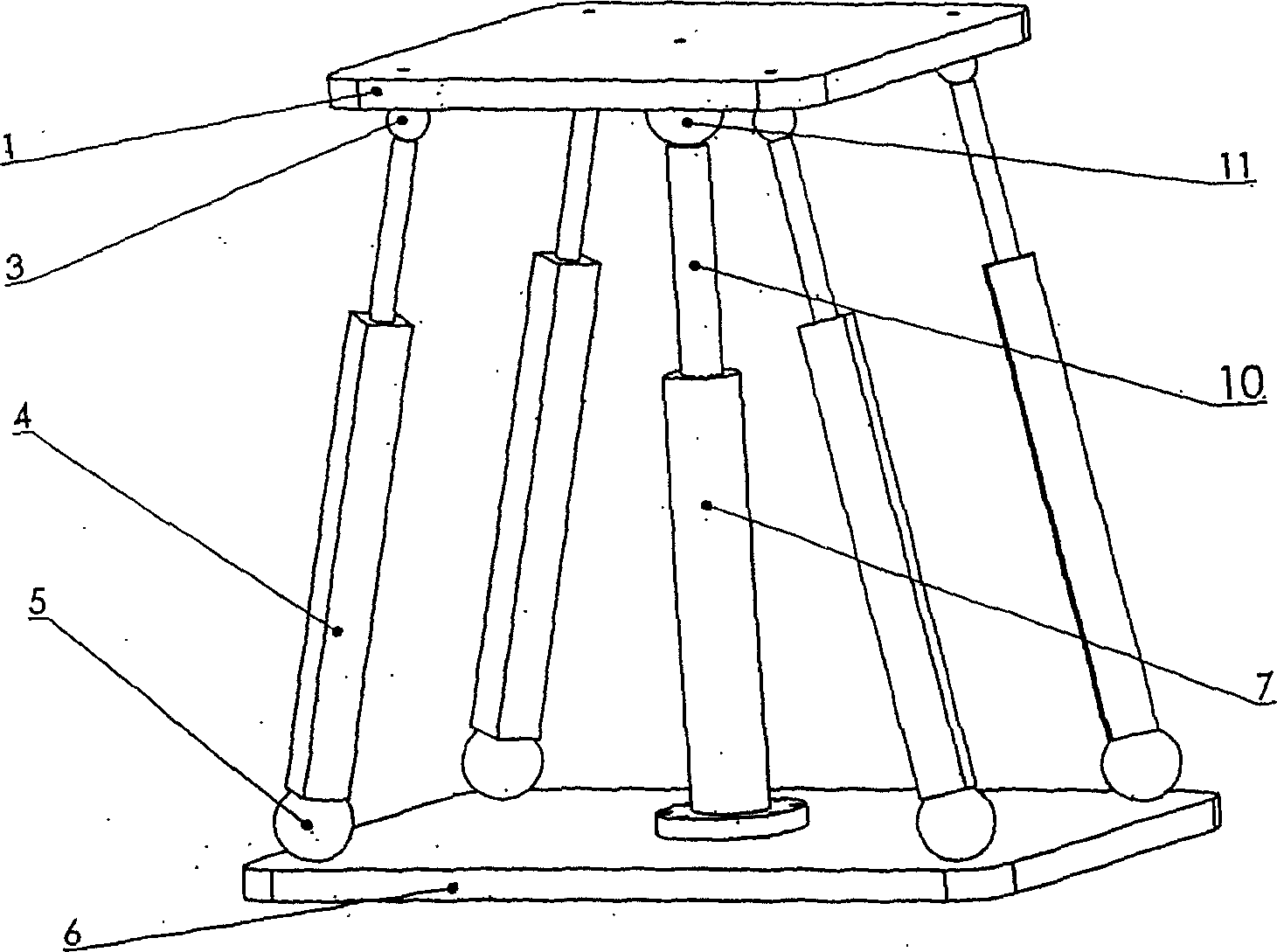
[0019] Such as figure 1 , figure 2 As shown, the present invention includes an upper platform 1, four active branch chains 2 of the same structure, a lower platform 6, and a driven branch chain 9; wherein:
[0020] 1) The active branch chain 2 includes: the upper joint 3 of the active branch chain, the linear motion actuator 4, and the lower joint 5 of the active branch chain, all of which are rigid components; Corner connection, the other end of the upper joint 3 of each active branch chain is respectively connected with the upper end of the linear motion actuator 4; one end of the lower joint 5 of each active branch chain is respectively connected with a corner of the lower platform 6, and each active branch chain lower The other end of the joint 5 is respectively connected to the lower end of the linear motion actuator 4; the center point B of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More