

Two-arm inspection robot control system based on field bus
A line inspection robot and field bus technology, applied in two-dimensional position/channel control, digital control, electrical program control, etc., can solve problems such as inability to cross, improve inspection efficiency, ensure normal operation, and ensure real-time performance effect with accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
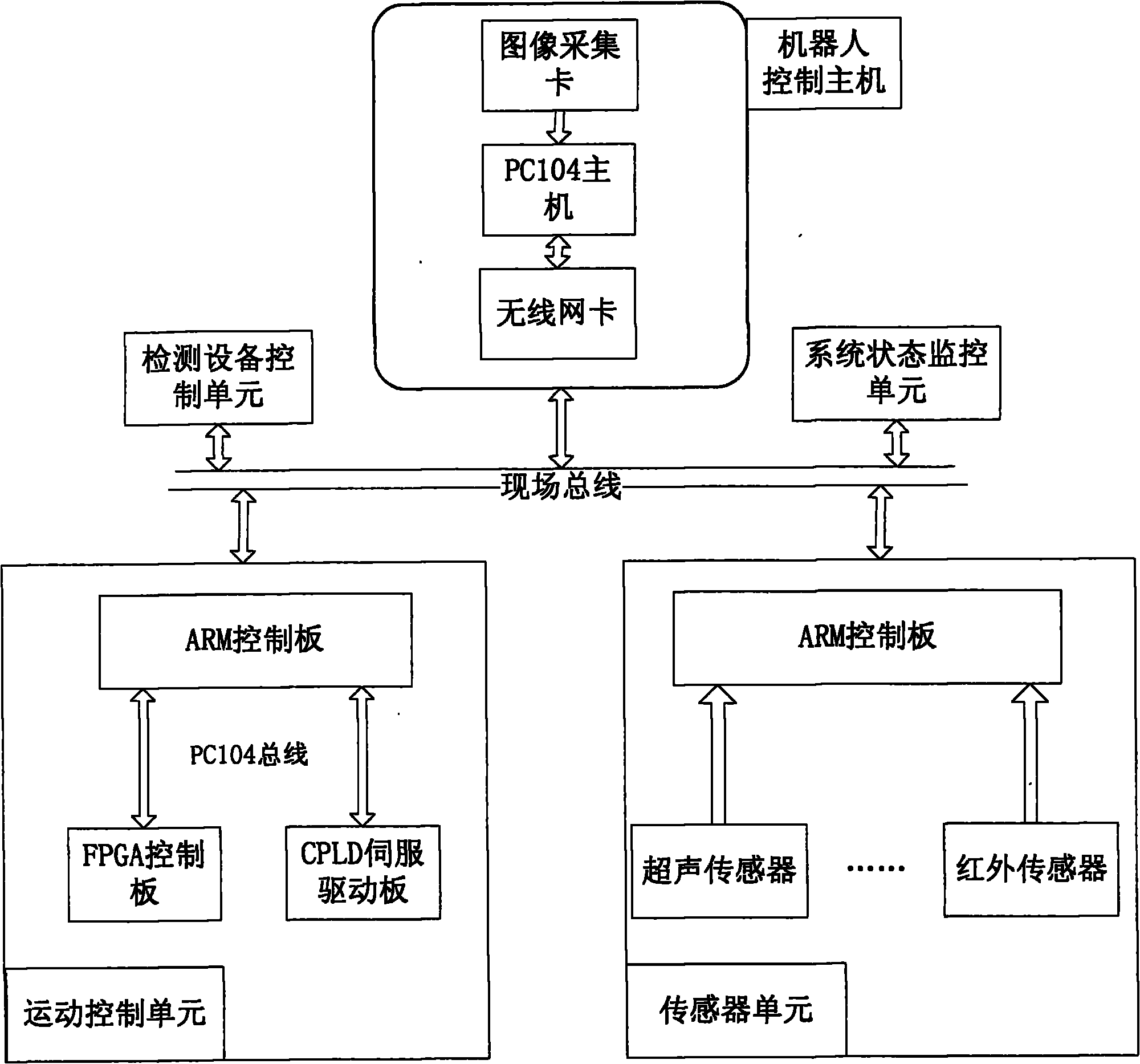
[0045] The present invention is a dual-arm inspection robot control system based on the field bus, which is based on an embedded microprocessor and an industrial computer, and is suitable for inspection operations of high-voltage transmission lines. The robot controls the host computer, motion control unit, sensor unit, and system status It consists of a monitoring unit and a testing equipment control unit.
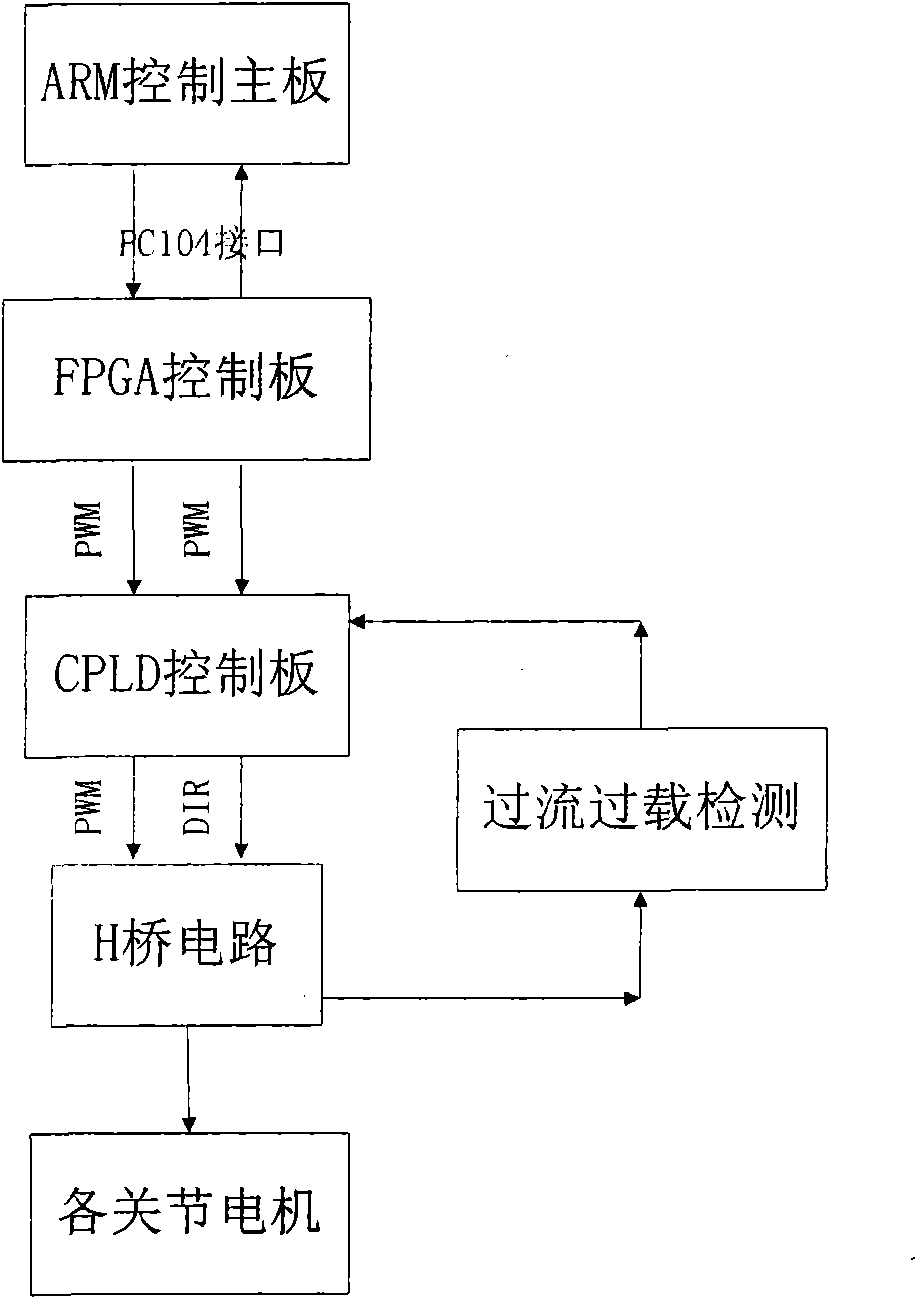
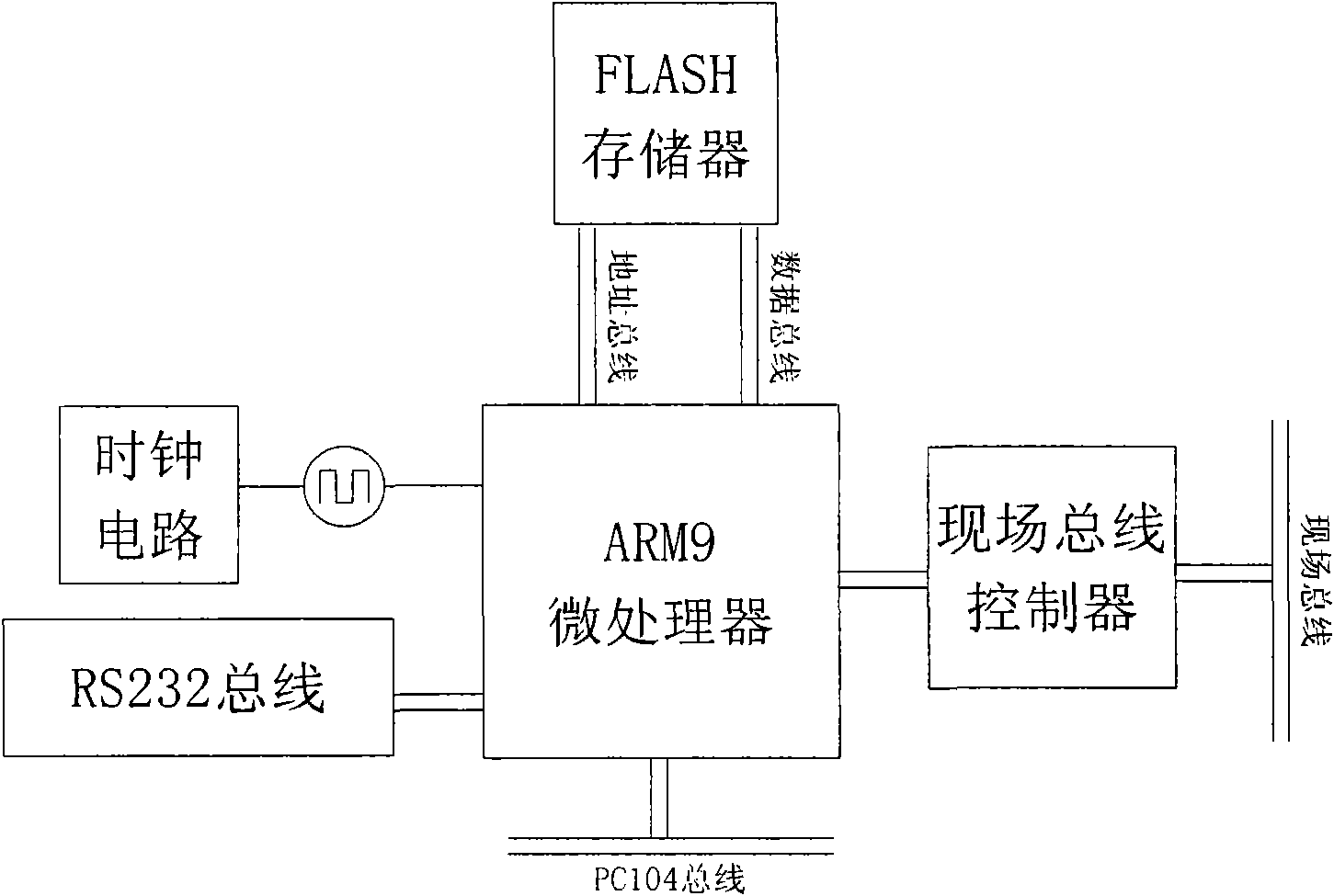
[0046] Among them, the robot control host is composed of embedded PC 104 computer, image acquisition card and wireless network card, which is the core part of the robot controller; the motion control unit is composed of ARM control board, FPGA control board and CPLD servo drive board, and the ARM control board is mainly Including ARM9 microprocessor, field bus interface, PC104 interface and RS232 interface, FPFA control board mainly includes FPGA chip, ROM configuration chip and PC104 interface, CPLD servo drive board mainly includes CPLD chip and clock chip, H bridge cont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More