

Embedded multinuclear main controller of modular robot based on FPGA (Field Programmable Gata Array)
A main controller, robot technology, applied in sequence/logic controller program control, electrical program control and other directions, can solve the problems of high energy consumption, bulky, low integration, etc., to achieve low energy consumption, small size , the effect of reducing the size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The implementation of the present invention will be described in detail below in conjunction with the accompanying drawings. This embodiment is implemented on the premise of the technical solution of the present invention, and the detailed implementation and specific operation process are given.
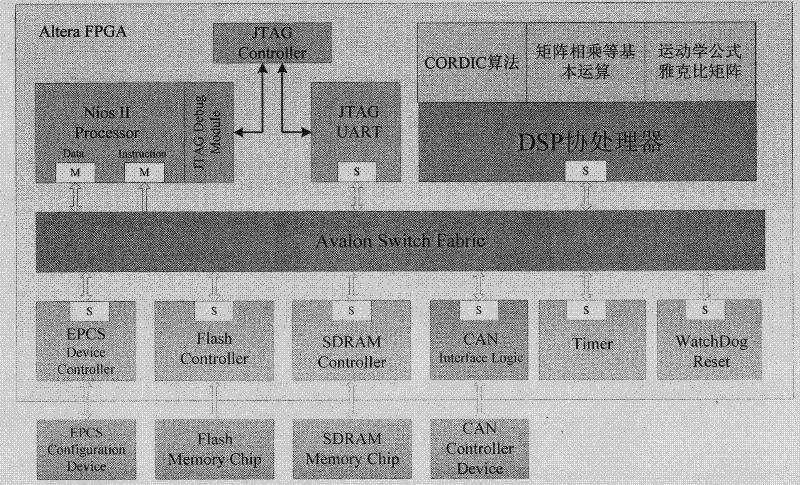
[0028] see figure 1 As shown, the internal structure of the on-chip multi-core main controller includes: Nios II soft-core processor, DSP coprocessor module, Avalon bus module, CAN bus control module, system clock module, watchdog and reset system module, JTAG interface module , Memory control module (FLASH memory, SDRAM memory, EPCS memory). Among them, the main control module is Nios II soft-core processor, which is connected with DSP coprocessor, system clock module, watchdog and reset system module, JTAG interface module, CAN bus control module and memory control module through Avalon bus module.
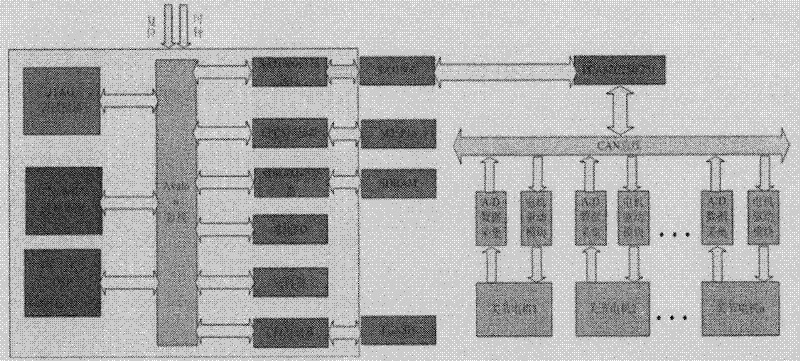
[0029] see figure 2 In the overall system structure shown, the FPGA chip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More