

Robot hand controller shared control method based on force fusion
A technology of shared control and hand controller, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of low degree of integration, difficulty in adapting to the working environment, and too many sensing signals.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0059] The present invention will be further described in detail below in conjunction with the embodiments and accompanying drawings, but the embodiment of the present invention is not limited to this embodiment.
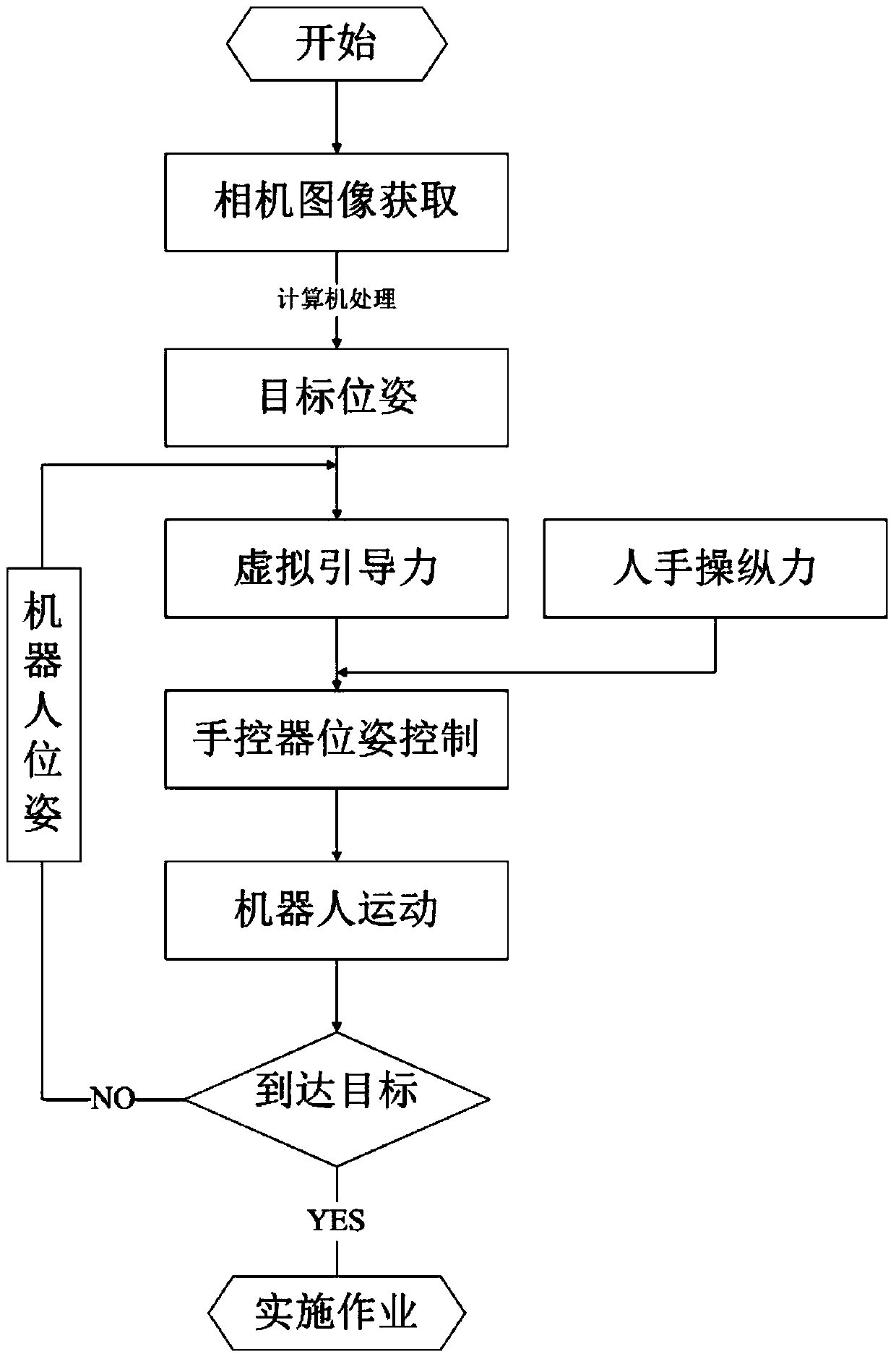
[0060] refer to figure 1 , a hand controller sharing control method based on force fusion, including the following steps:
[0061] a. Use the hand controller to operate the terminal, take the target object as the guide, and realize the manual manipulation force signal to control the movement of the robot through the operator's own intelligent decision-making, and realize it in the following specific ways:
[0062] 1. Build a robot motion control platform based on force closed loop;
[0063] 2. The computer collects the manipulative force signal and transmits the data to prepare for the system to control the movement of the hand controller;
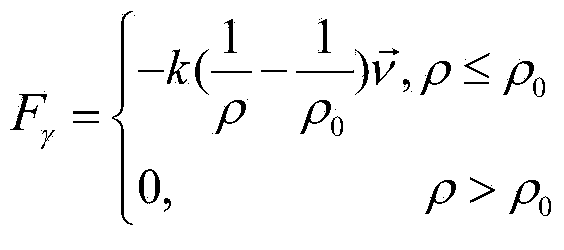
[0064] 3. Based on the mass-damping system control strategy, according to the dynamic model formula of the hand controller c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More