

Lower-limb exoskeleton training method and system triggered by brain-computer interface under motion imagination pattern
A technology of motor imagery and brain-computer interface, which is applied in the fields of appliances to help people walk, medical science, artificial legs, etc. It can solve problems such as difficulty in issuing commands, difficulty in mathematical models, and limited movement forms.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
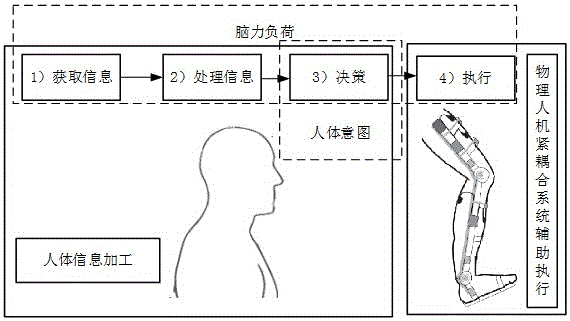
[0055] Such as figure 2 As shown, the information processing process of the physical human-machine tightly coupled system is as follows: firstly, the human body acquires and processes information, completes decision-making (human body intention), and executes motion actions.
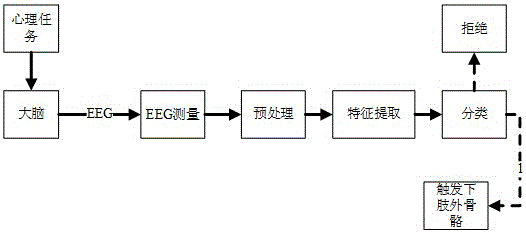
[0056] Such as figure 1 As shown, a lower extremity exoskeleton training method triggered by a brain-computer interface in motor imagery mode includes the following steps:
[0057] S1: Measure the user's EEG sample signal according to the preset motor imagery task, and do classification training; let the user wear the EEG signal acquisition hardware device Emotive, and store the EEG signal through the data acquisition software.
[0058] The motor imagery EEG data a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More