

Sliding mode variable structure control method with variable exponent coefficient reaching law sliding mode for permanent magnet synchronous motor
A permanent magnet synchronous motor, sliding mode variable structure technology, applied in the direction of motor control, motor generator control, AC motor control, etc., can solve the problems of low robustness, poor dynamic performance, etc., to achieve controller optimization and reduce vibration Vibration, chattering reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings, but the embodiments of the present invention are not limited thereto:
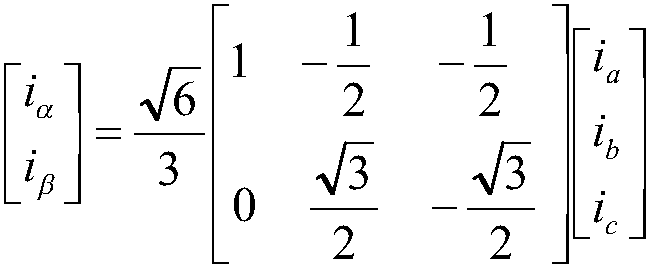
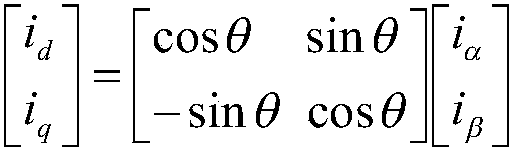
[0041] Step 1: If figure 1The schematic diagram of the proposed PMSM control method is shown, and the three-phase AC current signal i in the a-b-c stationary coordinate system is collected by the current sensor a i b and i c . Through software programming, after Clark transformation Get the two-phase i in the stationary coordinate system α and i β . In order to facilitate the design of the control system, the i α and i β Further transformed by Park Get i in the rotating coordinate system d and i q .
[0042] Step 2: Combine the given speed and the speed measured by the photoelectric encoder to get the speed deviation ω through the subtractor * -omega.
[0043] Step 3: The speed deviation ω obtained in step 2 * -ω is used as the input of the variable expone...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More