

Under-actuated upper limb rehabilitation robot control system
A rehabilitation robot and control system technology, applied in the direction of passive exercise equipment, gymnastics equipment, sports accessories, etc., can solve a single problem, only for patients in a specific rehabilitation period, patients with low degree of autonomy and participation, can not be effective Identify the patient's intentions and other issues to achieve the effect of light and flexible actuators, reducing the number of drives, and enriching the types
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0033] The specific process of using passive mode for rehabilitation exercise is as follows:
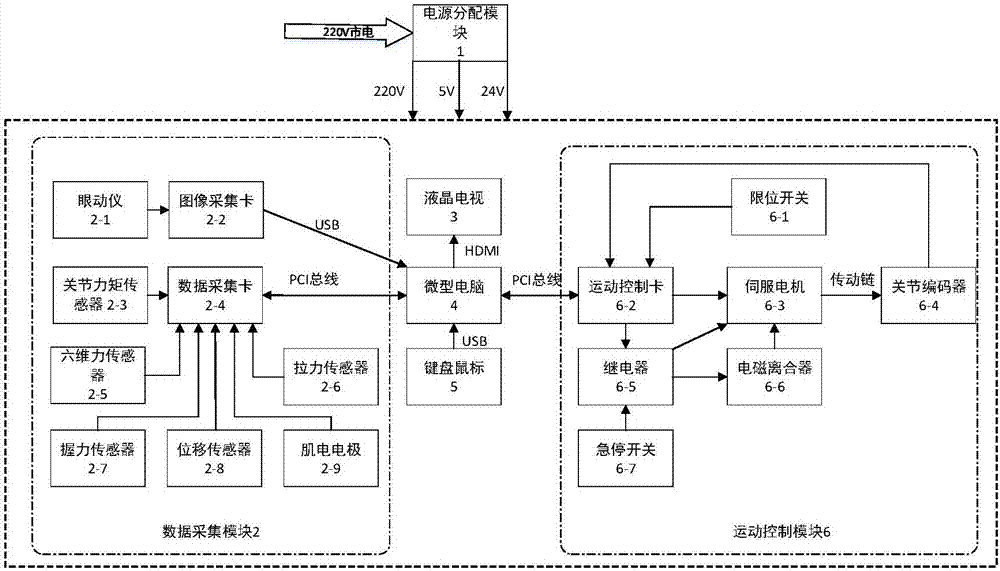
[0034] The patient’s arm is fixed to the robotic arm of the rehabilitation robot through a strap, and the hand is grasped at the handle of the robotic arm. The rehabilitation physician selects the required rehabilitation training actions through the keyboard and mouse 5 connected to the microcomputer 4 and modifies the corresponding parameters. The computer 4 sends the motion trajectory parameters corresponding to the rehabilitation action to the motion control card 6-2 through the PCI bus. The digital output port of the motion control card 6-2 controls the relay 6-5 to close, and then the relay 6-5 makes the electromagnetic clutch 6 6 and the servo motor 6-3 are powered on, and the motion control card 6-2 converts the motion command into an analog command that can be recognized by the servo drive 6-3 to control the motor motion. At this time, the servo motor 6-3 drives the wire rope to ...
Embodiment 2
[0040] The specific process when using eye movement mode for rehabilitation exercise is as follows:
[0041] The patient’s arm is fixed to the robotic arm of the rehabilitation robot through a strap, and the hand is grasped at the handle of the robotic arm. The eye tracker 2-1 is worn by the patient, and the pupil position is monitored in real time through a miniature camera installed on the eye tracker. And send to the microcomputer 4 through the image acquisition card 2-2, calculate the motion parameters required by the rehabilitation robot through the image algorithm in the microcomputer 4 and send them to the motion control card 6-2 and the motion control card 6-2 through the PCI bus. The digital output port control relay 6-5 closes together, and the relay 6-5 powers up the electromagnetic clutch 6-6 and the servo motor 6-3. At the same time, the motion control card 6-2 converts the motion command to the servo drive 6-3. The recognized analog command controls the motor moveme...
Embodiment 3
[0046] The specific process when using active assist mode for rehabilitation exercise is as follows:
[0047] The patient’s arm is fixed to the robotic arm of the rehabilitation robot through a strap, and the hand is grasped at the handle of the robotic arm. The patient applies a slight force to the handle. The direction of the force is the direction the patient wants to move. The six-dimensional force sensor 2-5 is The six-dimensional force information at the handle can be collected and sent to the microcomputer 4 through the data acquisition card 2-4. The microcomputer 4 calculates the required motion parameters of the rehabilitation robot through the corresponding algorithm and sends it to the motion control card 6 through the PCI bus. -2, the digital output port of the motion control card 6-2 controls the relay 6-5 closely, and then the relay 6-5 powers on the electromagnetic clutch 6-6 and the servo motor 6-3, and the motion control card 6-2 will move The instructions are co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More