

Electronic control differential mechanism in vector linkage with multi-wheel vehicle steering control mechanism
A technology of control mechanism and differential mechanism, which is applied in the direction of steering mechanism, fluid steering mechanism, steering rod, etc., and can solve the problem of not clearly displaying the output voltage of the generator
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] 1. The steering mechanism obtains the key control point bearing control vector drive voltage signal.
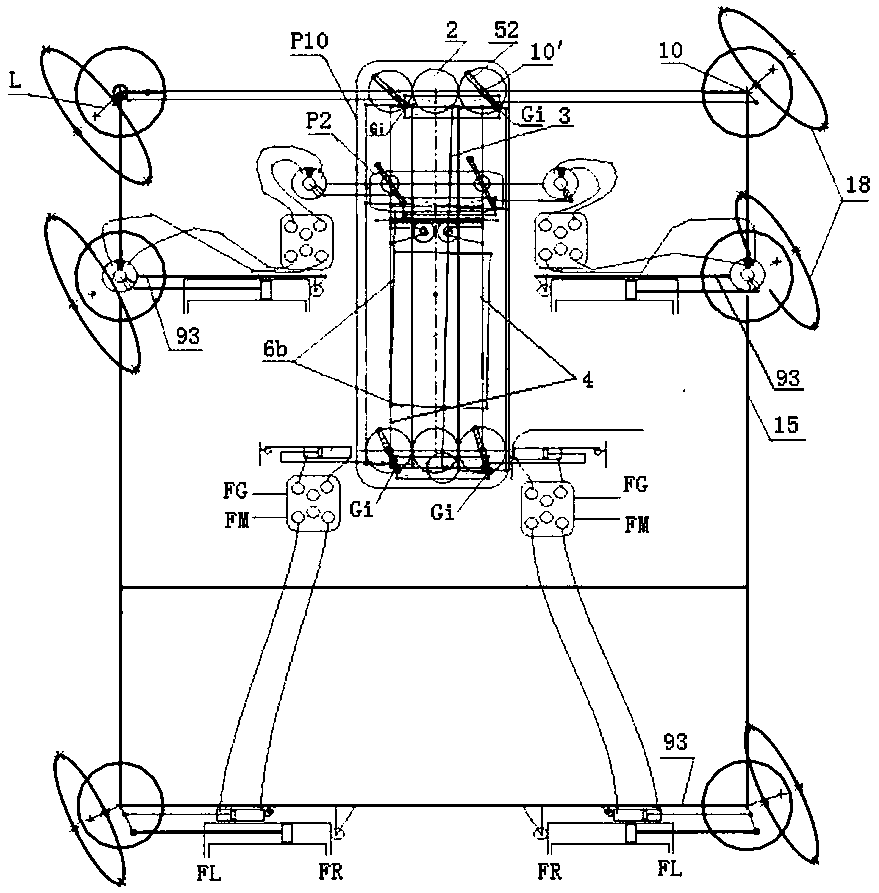
[0021] figure 1 It is a schematic diagram of the overall structure of the model steering mechanism, which is the same as the application number 2017201709604.8. It provides the basis for obtaining the key control point bearing Gi, the specific principle has been made public and will not be repeated here.
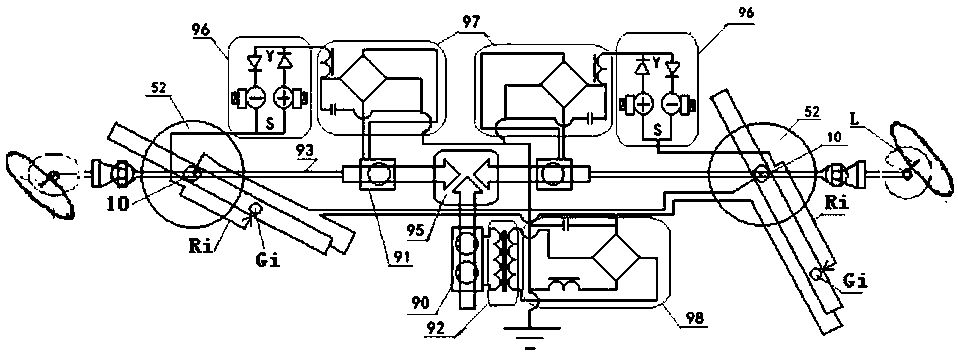
[0022] figure 2 The positions of the steering shaft (10) and auxiliary steering shaft (10') in figure 1 From the area of the second axis auxiliary steering shaft 10' shown in the vector control arm sliding pole shoe controller P2 in the model controller P10, it mainly indicates the key control point bearing Gi controls the sliding potentiometer output terminal pole shoe to obtain the vector control difference The target voltage U0i of the speed control, because there is no driving half shaft in the model controller P10, so the driving half shaft 93 is extended ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More