

Compensation controller and MEMS accelerometer closed-loop servo special integrated circuit
A technology for compensating controllers and resistances, which is applied in the direction of measuring acceleration, electric controllers, and controllers with specific characteristics, etc., and can solve problems such as closed-loop system instability, sensor output errors, sensor structural performance parameters, and circuit parameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
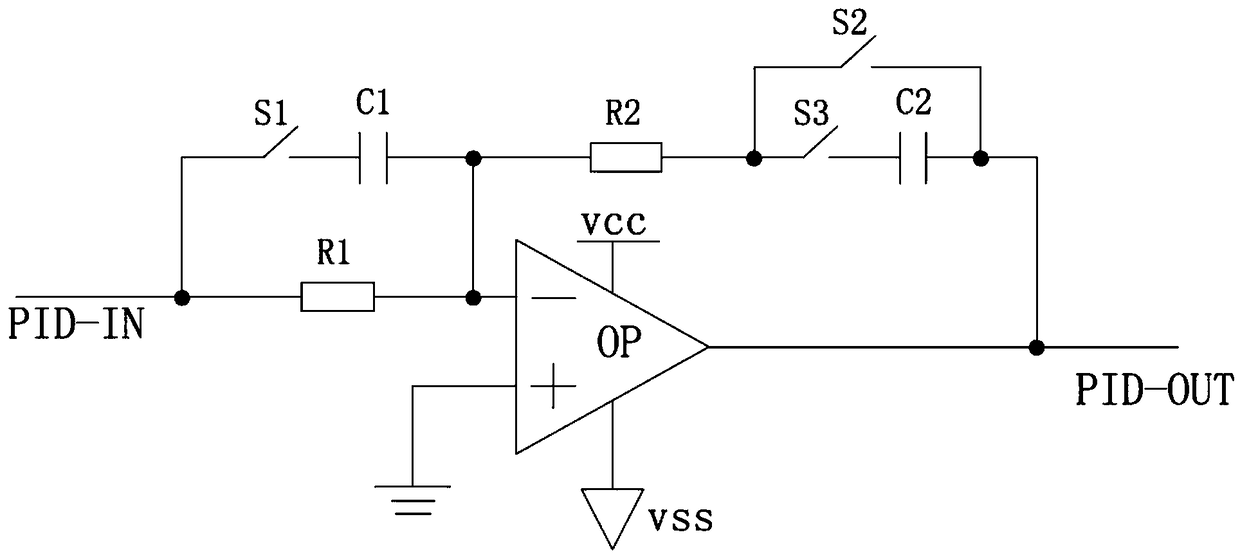
[0030] Such as figure 1 As shown, this embodiment discloses a compensation controller, including an operational amplifier OP, a resistor R1, a resistor R2, a capacitor C1, a capacitor C2, a switch S1, a switch S2, and a switch S3;
[0031] The compensation input terminal PID-IN is connected to the inverting input terminal of the operational amplifier OP after connecting the resistance one R1, the positive input terminal of the operational amplifier OP is grounded, and its output terminal is connected to the feedback output terminal;
[0032] Capacitor-C1 and switch-S1 are connected in series, and the whole connected in series is connected in parallel with resistor-R1; after capacitor-C1, switch-S1 and resistor-R1 are connected, the whole is connected to compensation input terminal PID-IN and reverse input of operational amplifier OP end;
[0033] Capacitor two C2 and switch three S3 are connected in series, and the whole connected in series is connected in parallel with switc...
Embodiment 2
[0063] Such as Figure 6 As shown, this embodiment discloses a MEMS accelerometer closed-loop servo ASIC, including capacitance-voltage converters, correlated double sampling circuits, sample-and-hold devices, unity-gain buffers, and compensation controllers with the above structures, ASICs Phase compensation is performed using the compensation controller described above. The output end of the capacitance-voltage converter is connected to the input end of the relevant double sampling circuit, the output end of the relevant double sampling circuit is connected to the input end of the sample-and-hold device, the output end of the sample-and-hold device is connected to the compensation controller, and the output end of the compensation controller is A unity-gain buffer is connected, and the output of the unity-gain buffer is connected to the input of the capacitor-to-voltage converter.
[0064] The capacitance-voltage converter is used for capacitance-voltage conversion. The ana...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More