

Walker aid robot system based on brain-machine-muscle information loop
A walking-assisting robot and loop technology, which can be applied in the fields of devices to help people walk, artificial respiration, medical science, etc., can solve the problems of inability to complete active rehabilitation training and the single form of rehabilitation training, and achieve considerable social and economic benefits Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the objectives, technical solutions, and advantages of the present invention clearer, the following describes the embodiments of the present invention in further detail.
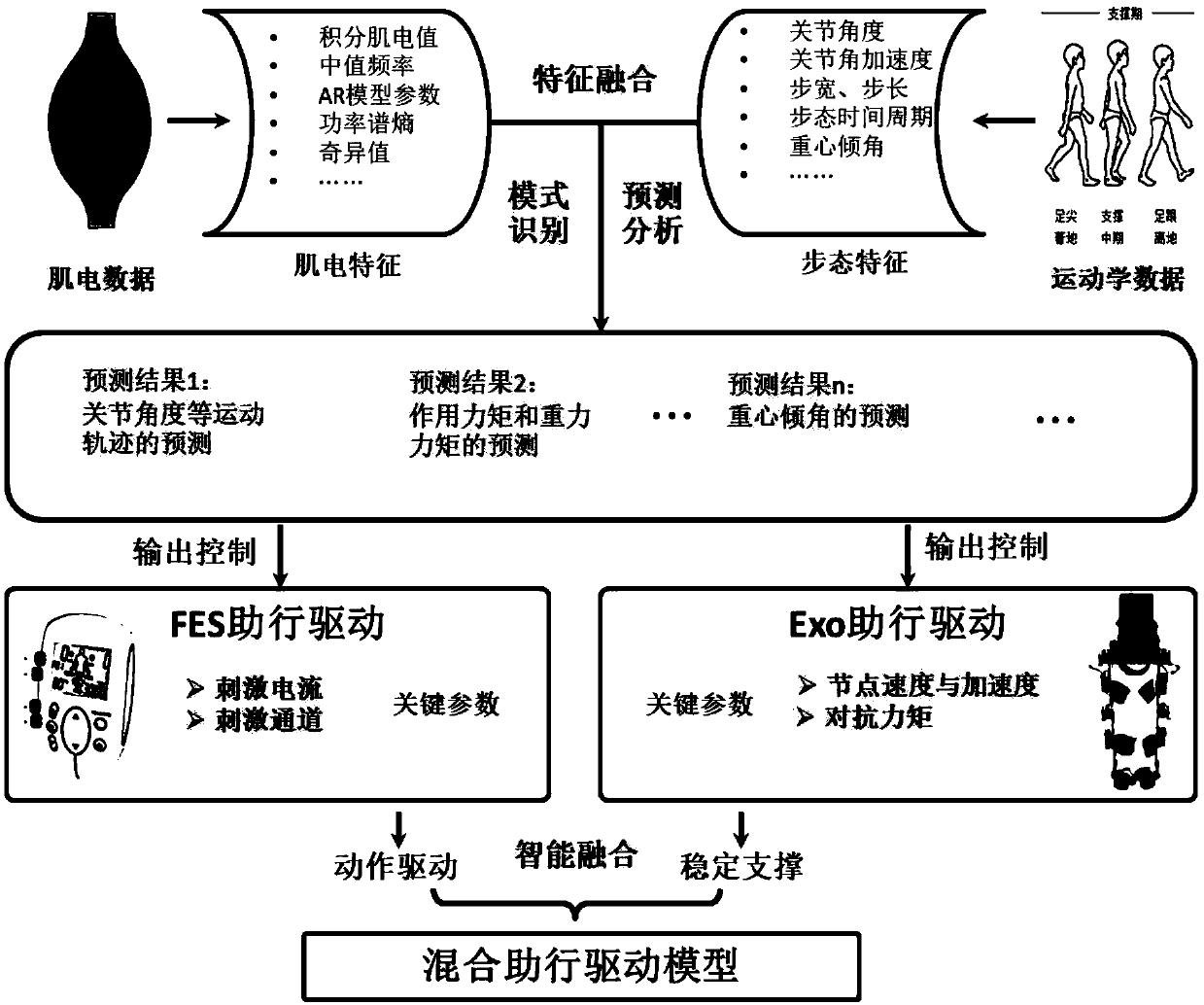
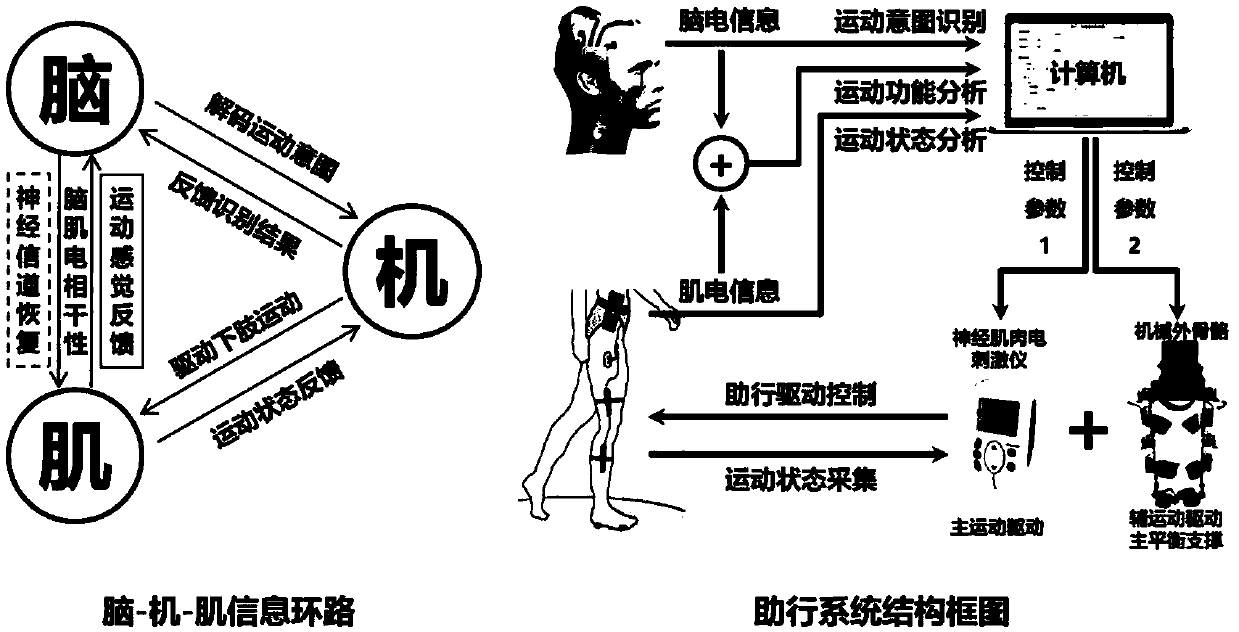
[0035] In practical applications, the FES alone system is significantly weaker than Exo in assisting walking function, while the therapeutic effect is significantly better than the latter, with different advantages and disadvantages. Therefore, some research teams have proposed a joint system concept of FES and Exo: With FES as the active control source of muscle movement, the Exo system carries various sensors to measure the joint motion angular velocity, angular acceleration and joint angle of the limbs and sends it to the main control unit. Feedback to control the intensity of FES stimulation and at the same time play a good auxiliary support role.
[0036] This kind of rehabilitation robot system based on FES and supplemented by Exo can not only play a good role in replacing the patien...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More