

Automatic driving control method based on CNN-LSTM
A technology of automatic driving control and driving platform, applied in neural learning methods, special data processing applications, instruments, etc., can solve problems such as not covering all road conditions, complex and changeable road conditions, etc., to achieve accurate and reliable judgment, comprehensive road condition information, source wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0086] like Figure 5 to Figure 6 As shown, S11: Collect the image data (pictures in units of frames) from the driving video at a frequency of 10 Hz, and use the simulation driving platform to perform corresponding operations to collect the opening of the accelerator pedal, the opening of the brake pedal, the steering wheel Corner and gear information.
[0087] S12: Use the Tensorflow framework to automatically extract the area of interest from the image data, and standardize it into a unified size of 200×200×3 (3 is the number of channels, indicating the RGB color space), and organize the driving data into a two-dimensional sheet of [1,4] quantity.
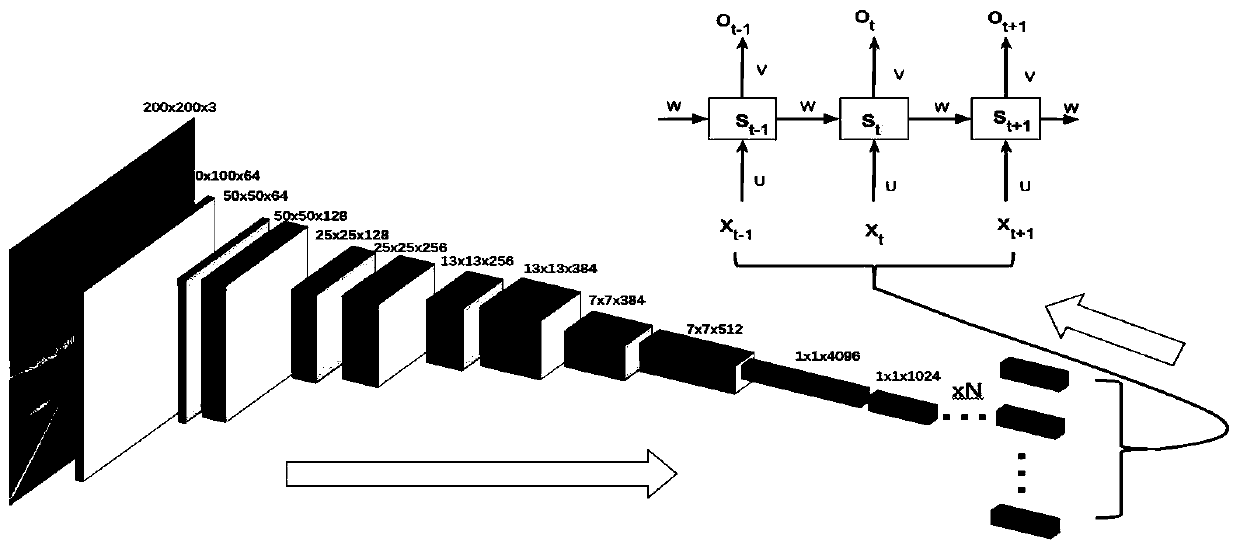
[0088] S13: Build a CNN-LSTM neural network. The CNN part consists of 5 convolutional layers, 4 pooling layers, and 2 fully connected layers. The LSTM part consists of 100 LSTM units. The specific parameters are as follows:
[0089] Input image: 200×200×3
[0090] Convolution layer 1: Convolution kernel 3×3, step size 2, sam...
Embodiment 2
[0107] S21: Collect the image data (pictures in units of frames) from the CARLA simulation environment at a frequency of 20 Hz, and use the simulation driving platform to perform corresponding operations to collect the opening of the accelerator pedal, the opening of the brake pedal, the steering wheel angle and gear information.
[0108] S22: Use the Tensorflow framework to automatically extract the area of interest from the image data, and standardize it into a unified size of 300×300×3 (3 is the number of channels, indicating the RGB color space), and organize the driving data into a two-dimensional sheet of [1,4] quantity.
[0109] S23: Build a CNN-LSTM neural network. The CNN part consists of 5 convolutional layers, 4 pooling layers, and 2 fully connected layers. The LSTM part consists of 150 LSTM units. The specific parameters are as follows:
[0110] Input image: 300×300×3
[0111] Convolution layer 1: Convolution kernel 3×3, step size 2, same padding, ReLU activati...
Embodiment 3
[0128] S31: Drive the real vehicle and use the frequency of 30Hz to collect the image data (pictures in frames) by the driving recording device, and record the corresponding operation of the driver at the same time, collecting the opening of the accelerator pedal, the opening of the brake pedal, the steering wheel angle and the gear. bit information.
[0129] S32: Use the Tensorflow framework to automatically extract the area of interest from the image data, and standardize it into a unified size of 400×400×3 (3 is the number of channels, indicating the RGB color space), and organize the driving data into two-dimensional sheets of [1,4] quantity.
[0130] S33: Build a CNN-LSTM neural network. The CNN part consists of 5 convolutional layers, 4 pooling layers, and 2 fully connected layers. The LSTM part consists of 200 LSTM units. The specific parameters are as follows:
[0131] Input image: 400×400×3
[0132] Convolution layer 1: Convolution kernel 3×3, step size 2, same pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More