

Semantic mapping method based on visual SLAM and two-dimensional semantic segmentation
A technology of semantic segmentation and semantic mapping, which is applied in the field of cross-integration of computer vision and deep learning, can solve problems such as affecting the quality of the built map, and achieve the effect of improving robustness and system performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the invention, not to limit the invention.
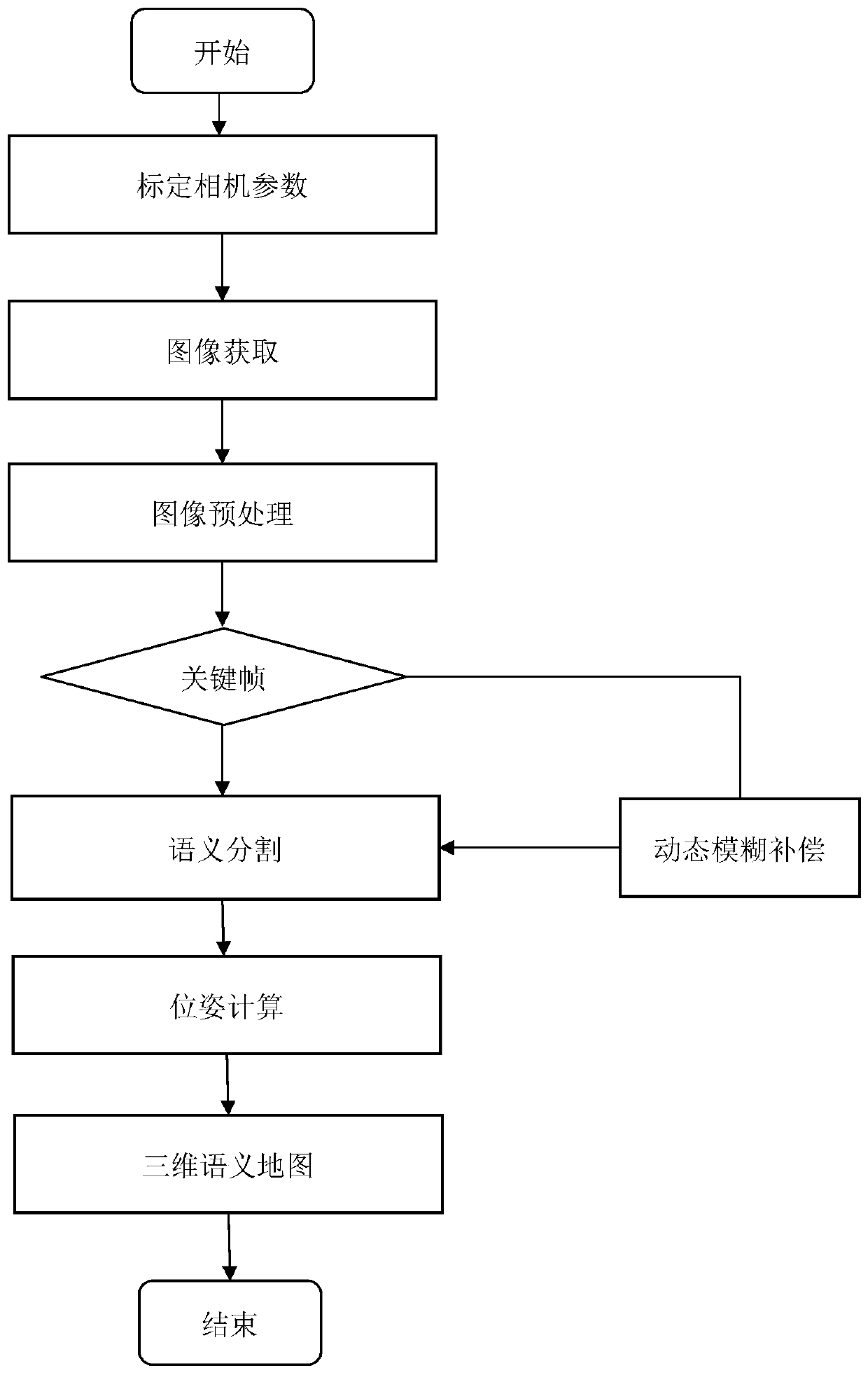
[0078] The concept of semantic map refers to a map containing rich semantic information, which represents the abstraction of semantic information such as spatial geometric relations and existing object types and positions in the environment. The semantic map contains both the environmental spatial information and the environmental semantic information, so that the mobile robot can know both the objects in the environment and what the objects are like a human.
[0079] Aiming at the problems and deficiencies in the prior art, the present invention proposes a semantic mapping system based on visual SLAM and two-dime...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More