

Disturbance suppression and high-precision tracking control method for brushless direct current motor servo system
A brushed DC motor and servo system technology, used in AC motor control, electronic commutation motor control, general control strategies, etc. It does not meet the matching conditions and other problems, and achieves the effect of real-time estimation, high tracking control accuracy, and high tracking accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
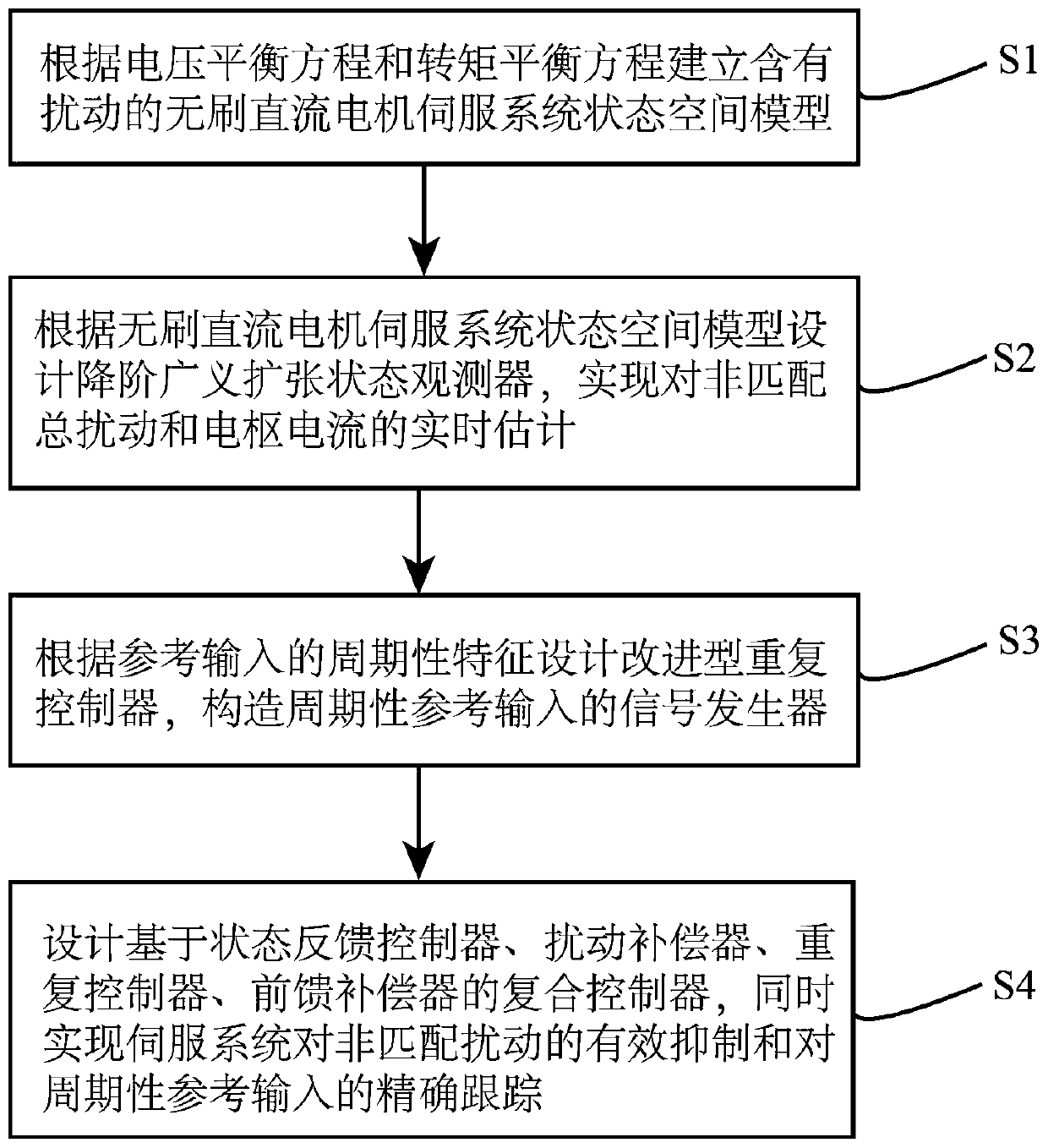
[0062] Such as figure 1 As shown, a method for disturbance suppression and high-precision tracking control of a brushless DC motor servo system of the present invention, the steps include:
[0063] Step S1: Establish a state-space model of the brushless DC motor servo system with disturbances according to the voltage balance equation and the torque balance equation;
[0064] Step S2: Design a reduced-order extended state observer based on the state space model of the brushless DC motor servo system to realize the non-matching total disturbance f(t, x p ,M c ) and real-time estimation of the armature current i(t);
[0065] Step S3: Design an improved repetitive controller according to the periodic characteristics of the reference input, and construct a periodic reference input signal generator;
[0066] Step S4: Construct a composi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More