

Substation inspection robot image semantic analysis system and method
A patrol inspection robot and semantic analysis technology, applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as heavy workload, subjective judgment of inspection and detection points, and data analysis delay, etc., to improve operation safe effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
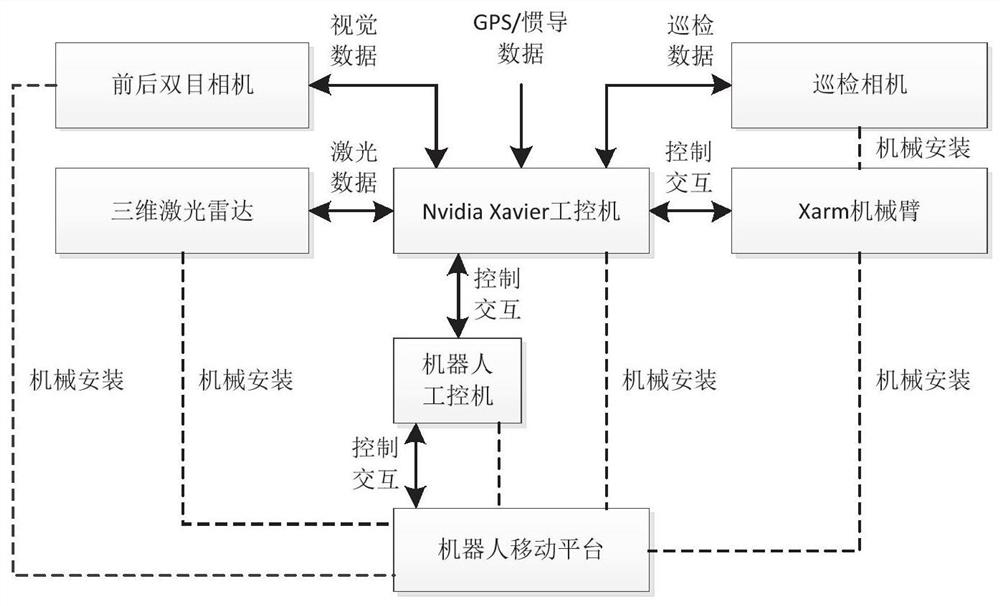
[0056] This embodiment discloses a robot image semantic analysis system based on embedded AI technology, including: an embedded AI analysis module, and a multi-degree-of-freedom mechanical arm connected to the embedded AI analysis module, a patrol camera, a binocular Vision camera, three-dimensional laser radar, inertial navigation sensor, robot industrial computer and multi-degree-of-freedom camera platform; wherein, the binocular vision camera is set at the front end of the robot, and the inspection camera is set at the end of the mechanical arm through the multi-degree-of-freedom camera platform. The industrial computer is connected to the robot motion platform. It can realize the data access and synchronous acquisition of multiple vision, laser, GPS, inertial navigation and other sensors, so as to realize the panoramic perception of the robot itself and its surrounding environment. Among them, the binocular vision camera is used to build semantic maps; the inspection data ...
Embodiment 2
[0099] This embodiment provides a method for image semantic analysis of a substation inspection robot, and the method includes the following steps:
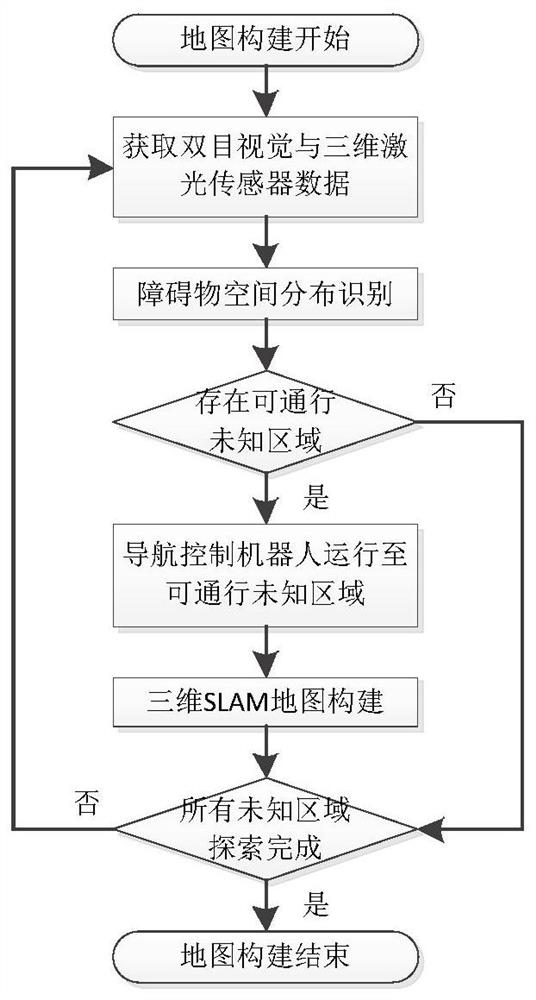
[0100] Real-time acquisition of binocular image data, inspection image data and 3D point cloud data of the current environment;
[0101] Obtain the spatial distribution of objects in the current environment based on binocular image data and 3D point cloud data;
[0102] According to the spatial distribution of objects in the current environment, determine whether there is a passable unknown area, if there is, control the robot to move to the passable unknown area, and execute map construction; if not, the map construction ends;
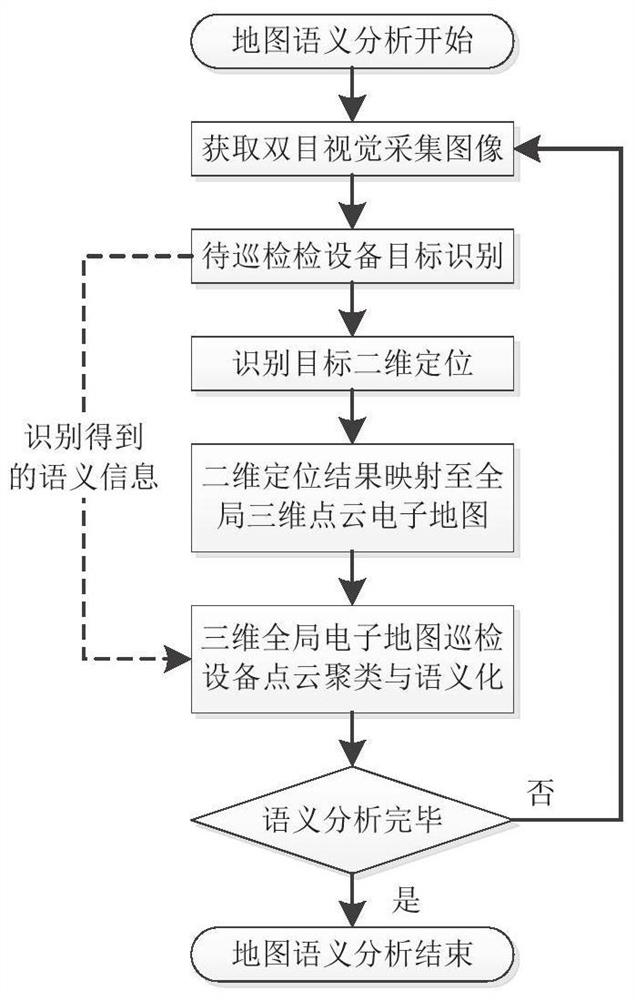
[0103] Wherein, the execution map construction includes: obtaining the spatial distribution of objects in the current environment based on the binocular image data; obtaining the semantic information of the objects in the current environment based on the inspection image data; according to the spatial po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More