

Multi-modal bridge crane swing suppression control method based on artificial neural network
An artificial neural network and suppression control technology, which is applied in the field of multi-mode bridge crane swing suppression control based on artificial neural network, can solve the problems of reduced life of the control system, lack of efficiency and stability, and difficulty in direct control, so as to avoid offline Effects of iterating steps, resolving bad performance, and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
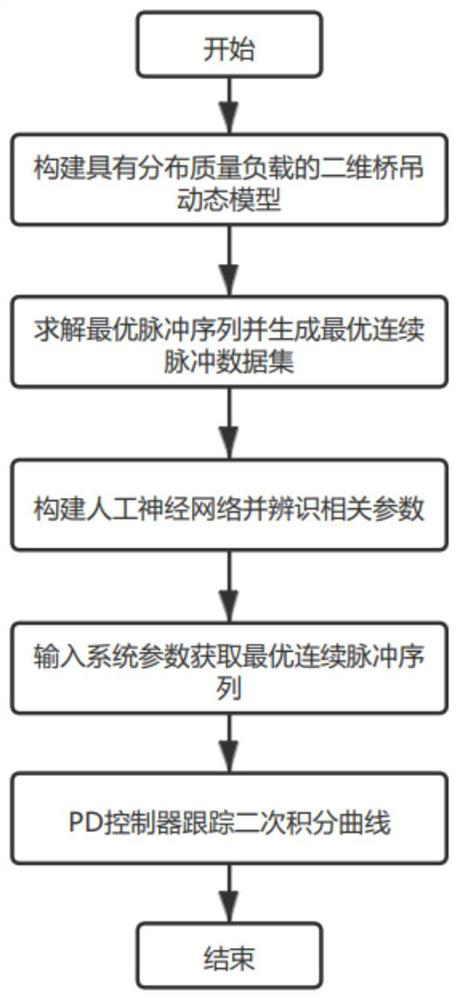
[0065] refer to Figure 1~2 , which is an embodiment of the present invention, provides a multi-mode bridge crane swing suppression control method based on artificial neural network, including:
[0066] S1: According to the Lagrangian equation and the bridge crane model, construct a two-dimensional dynamic model of the bridge crane with distributed mass loads. It should be noted that,
[0067] Combined with the friction in the application process, the Lagrangian modeling equation is used to construct a multi-modal dynamic model of bridge cranes with distributed mass loads. The multi-modal dynamic model is expressed as:
[0068]
[0069]
[0070]
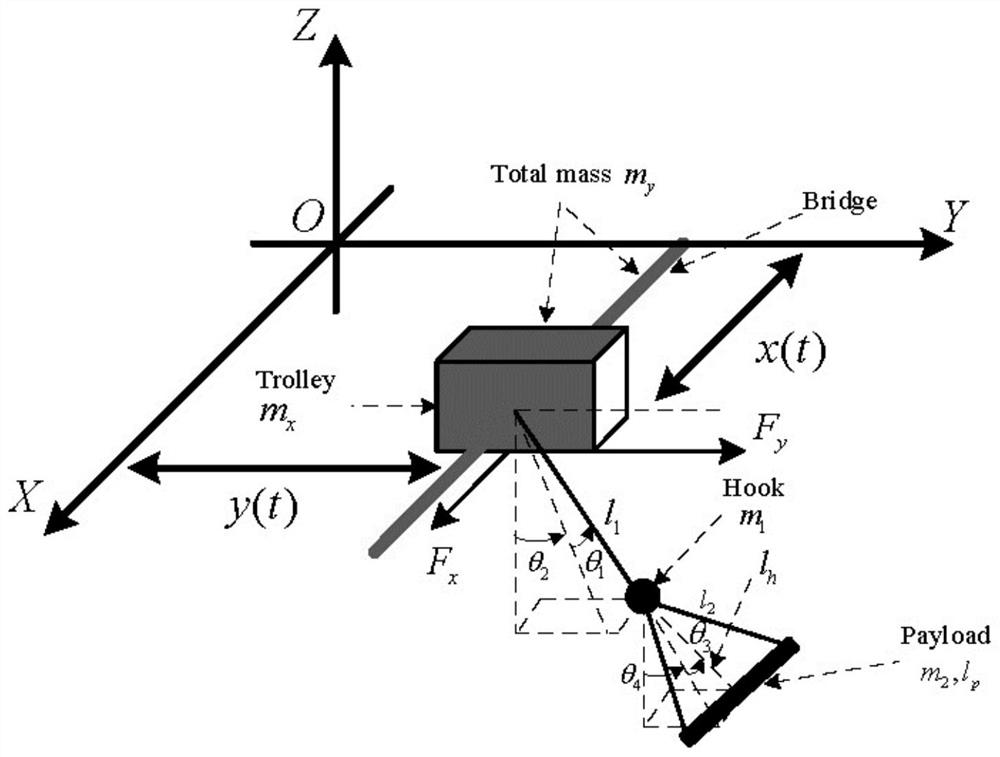
[0071] Among them, m is the mass of the transport vehicle, m 1 and m 2 are the masses of the hook and the load, respectively, l 1 is the length of the rope between the transport vehicle and the hook, l h is the vertical distance between the hook and the centroid of the distributed mass load, θ 1 and θ 2 are the angle o...
Embodiment 2
[0097] refer to Figure 3-5 , is another embodiment of the present invention. In order to verify and illustrate the technical effect adopted in this method, this embodiment uses a traditional ZVDD controller to conduct a comparative test with the method of the present invention, and compares the test results by means of scientific demonstration to verify this method. the real effect it has.
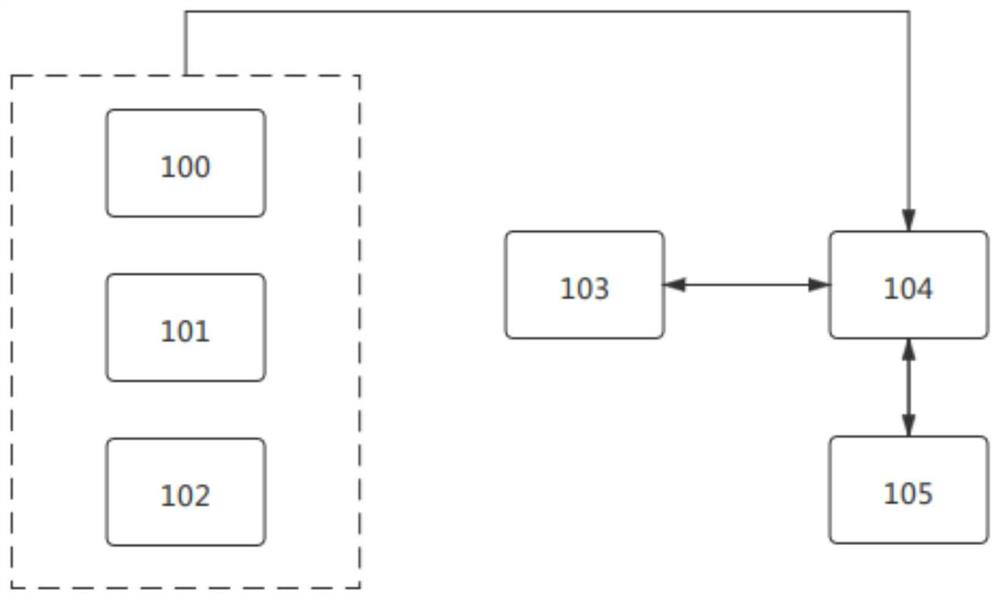
[0098] refer to image 3 , in order to verify the beneficial effect of the present invention, set up a bridge crane hardware platform, this platform carries out similar simulation according to the actual crane, and the built platform has 6 absolute encoders altogether, in the present invention, used wherein three absolute coders device, including a hook angle encoder 100, a load angle encoder 101, and a displacement encoder 102, which are used to measure the angle value of the hook and the load in real time and the displacement of the transport vehicle and the guide rail respectively. Fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More