

Centralized controller device of embedded crawling robot welding system
A technology of crawling robots and welding systems, applied in welding equipment, welding accessories, electrode support devices, etc., can solve the problems of large electromagnetic noise, large volume, affecting the stability of arc voltage, etc., to improve the quality of welding seam forming, expand the interface rich , the effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
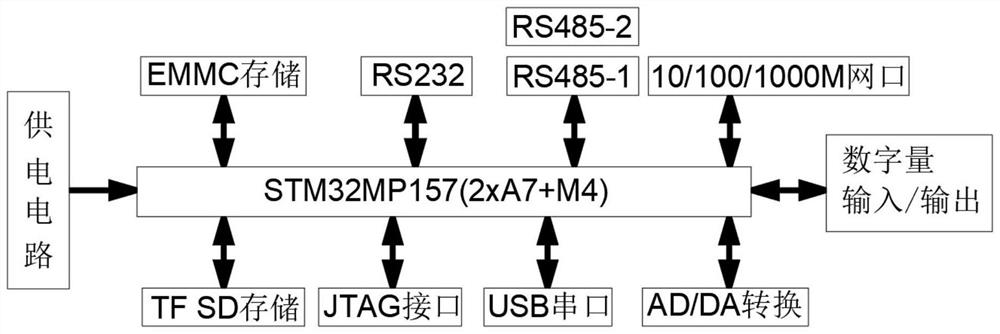
[0049] An embedded crawler robot welding system centralized controller device, such as figure 2 As shown, it includes a processor, a conversion circuit connected to the processor, a power supply circuit, a storage circuit, an interface circuit, a communication circuit, a digital input circuit and a digital output circuit.
[0050] In this embodiment, the processor adopts STM32MP157DAA1 multi-core heterogeneous chip, based on dual-core A7 800MHz main frequency and 209MHz M4 to form multi-core heterogeneous, integrated on one chip, running embedded Linux and FreeRTOS at the same time, respectively running on different kernels , in which the first A7 core and the second A7 core are connected to each other through a shared bus, run the embedded Linux system together, and distribute multiple threads to different A7 cores to achieve parallel computing and improve computing speed, while the dual A7 cores and M4 The core is also connected through the bus and receives processing infor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More