

Tail end puncture execution device of medical surgical robot
A surgical robot and execution device technology, applied in the field of medical puncture devices, can solve the problems of not considering the participation of doctors, increase time costs, and fail to perform automatic puncture, save time and medical costs, reduce the number of punctures, and improve The effect of ease of operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the above objects, features and advantages of the present invention more obvious, the specific implementation manners of the present invention will be described in detail and completely below in conjunction with the accompanying drawings.
[0033] It should be noted that, in the description of the present invention, terms indicating directions, positions, and corresponding relationships, such as "outside", "bottom", "axial", "center", etc., are based on the orientation shown in the drawings or The positional correspondence is only for the convenience of describing the present invention, and does not mean that some components can only be installed in this way. In addition, terms such as "connected", "connected" and "fixed" appearing in the present invention do not mean to make clear limitations on the parts of the part, which may be fixed connection, mechanical connection or electromagnetic connection.
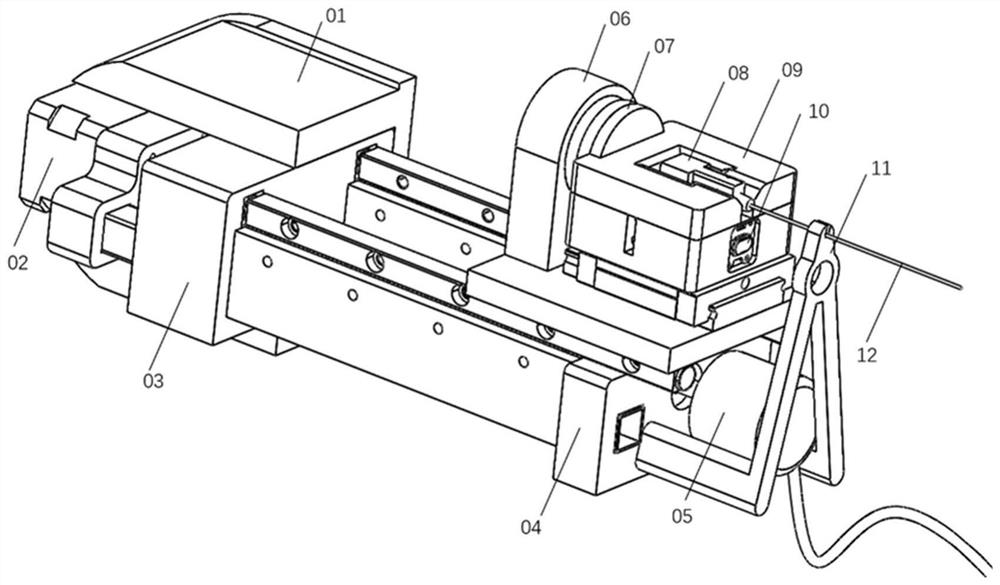
[0034] Such as figure 1 and Figure 4 As shown, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More