

Radar positioning method and device, storage medium and terminal
A radar positioning and pose estimation technology, applied in the fields of computer vision and machine perception, can solve the problems of limited hardware service life, large limitations, and large storage space requirements, so as to improve the scope of application, reduce the amount of calculation, and computing power The effect of low consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
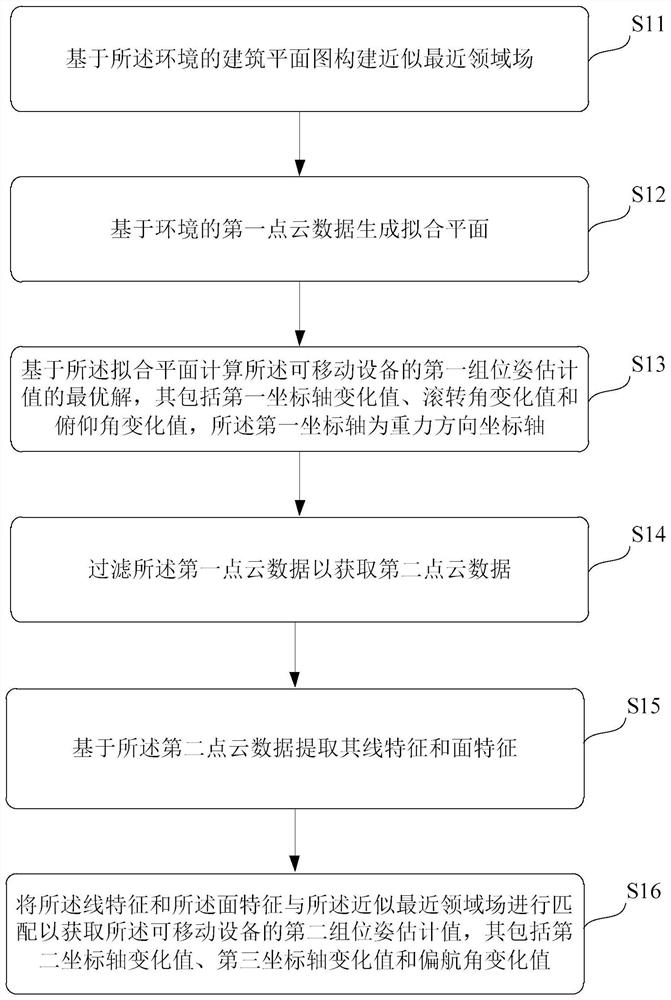
[0027] Such as figure 1 As shown, this embodiment proposes a schematic flow diagram of a radar positioning method, which is applied to a mobile robot, including steps S11 to S16, specifically expressed as follows:
[0028] Step S11. Construct an approximate nearest field field based on the building plan of the environment.
[0029]In a preferred implementation manner of this embodiment, the method of constructing the approximate nearest domain field includes: extracting the geometric elements in the building plan, and constructing a mathematical model, weighting value (greater than 0 and less than 1) and Numbering; dividing the building plan into multiple identical square areas; calculating the distance from the geometric elements in each of the square areas to the center of the area to obtain the preset number of nearest geometric elements in each area; dividing the nearest geometric elements The numbers stored in the corresponding area; Repeatedly divide each square area in...
Embodiment 2
[0065] Such as Figure 5 As shown, the embodiment of the present invention proposes a schematic structural diagram of a radar positioning device, which includes: an approximate nearest field construction module 51, which is used to construct an approximate nearest field based on the building plan of the environment; a radar module 52, which is used to collect The first point cloud data of the environment; the plane fitting module 53 is used to generate a fitting plane based on the first point cloud data of the environment; the first group of pose estimation module 54 is used to calculate the movement based on the fitting plane The optimal solution of the first group of pose estimation values of the robot, which includes the first coordinate axis change value, the roll angle change value and the pitch angle change value, and the first coordinate axis is the gravity direction coordinate axis; the filtering module 55 uses For filtering the first point cloud data to obtain the s...
Embodiment 3
[0069] An embodiment of the present invention provides a computer-readable storage medium, on which a computer program is stored, and when the computer program is executed by a processor, the radar positioning method is implemented.
[0070]Those of ordinary skill in the art can understand that all or part of the steps for implementing the above method embodiments can be completed by hardware related to computer programs. The aforementioned computer program can be stored in a computer-readable storage medium. When the program is executed, it executes the steps of the above-mentioned method embodiments; and the aforementioned storage medium includes: ROM, RAM, magnetic disk or optical disk and other various media that can store program codes.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More