

Residual vibration suppression system and method for industrial robot
An industrial robot, residual vibration technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as affecting product quality, uneven coating, unqualified, etc., to reduce technical costs, ensure contour accuracy, and reduce motors. the impact of
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
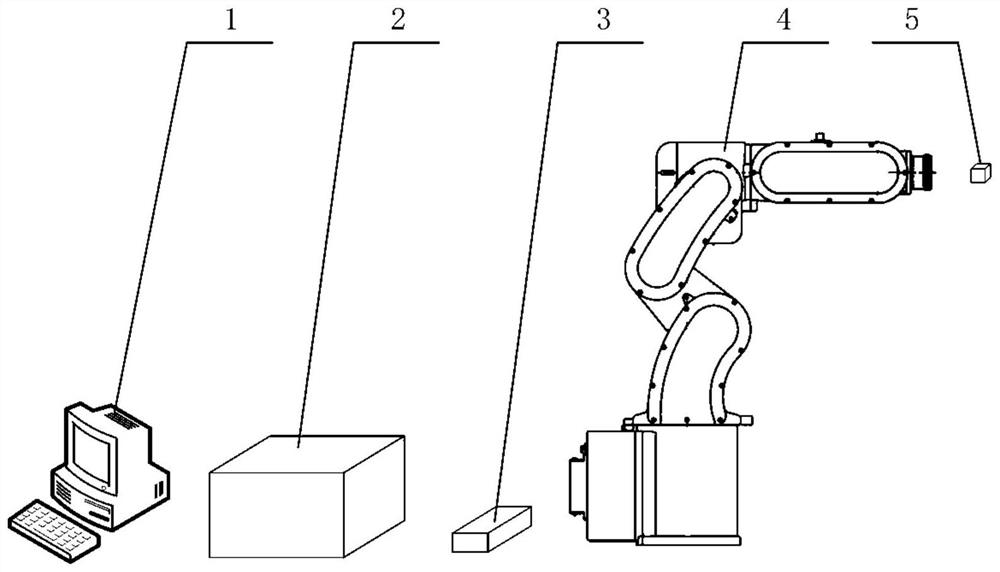
[0114] Such as figure 1 As shown, a residual vibration suppression method for industrial robots, the residual vibration suppression system for industrial robots used in this method includes an embedded industrial computer 1 with real-time control functions, an acceleration sensor 5, an acceleration signal transmission device 3, an industrial robot 4 and its servo driver 2, the acceleration sensor 5 is installed on the end 4 of the industrial robot through the acceleration sensor fixing element, and the collected acceleration signal is connected to the servo driver 2 of the industrial robot through the acceleration signal transmission device 3, and passed through the gigabit industrial The Ethernet interface connects the servo driver 2 with the embedded industrial computer 1; the acceleration sensor 5 is used to measure the acceleration signal and outputs it in an analog form; the acceleration signal transmission device 3 realizes the EtherCAT bus protocol stack, and the acceler...
Embodiment 3
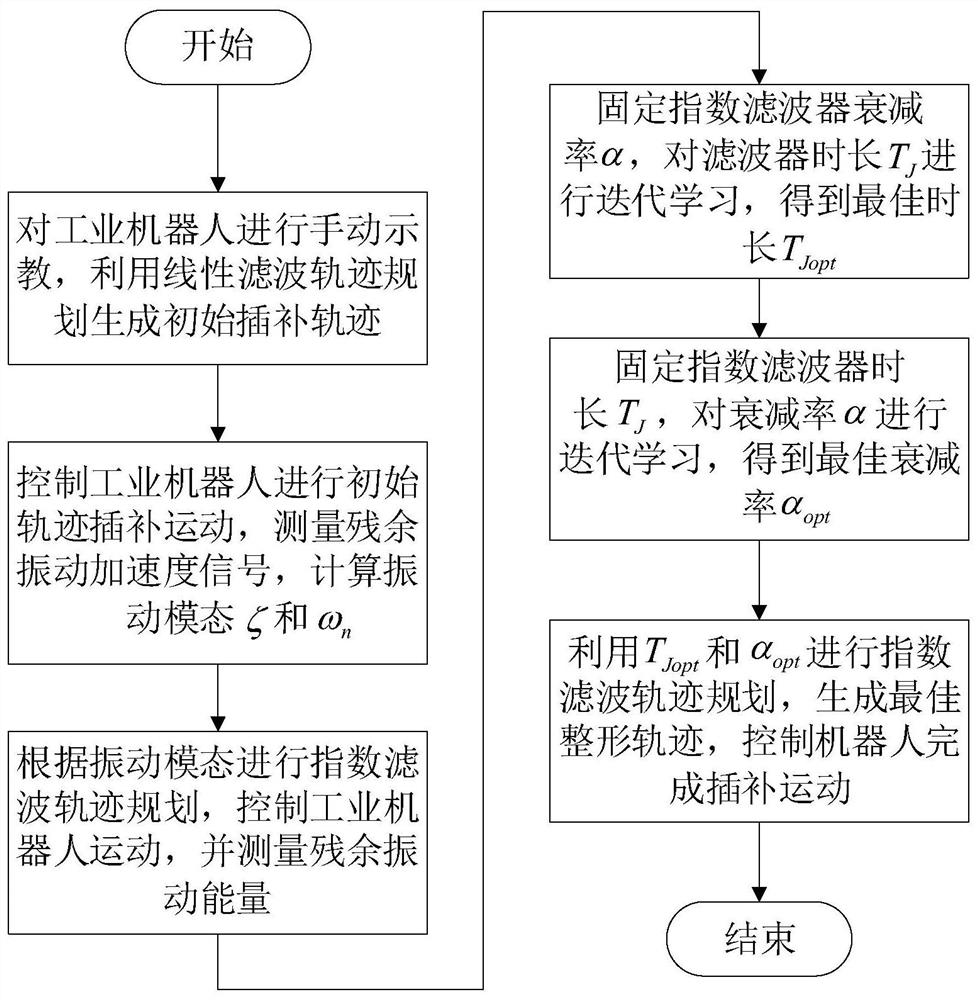
[0118] Such as figure 2 As shown, a residual vibration suppression method for industrial robots includes the following steps:
[0119] S1. Perform manual teaching on the industrial robot 4, determine the interpolation trajectory type and running time, perform linear filter trajectory planning on the industrial robot, and generate an initial interpolation trajectory;
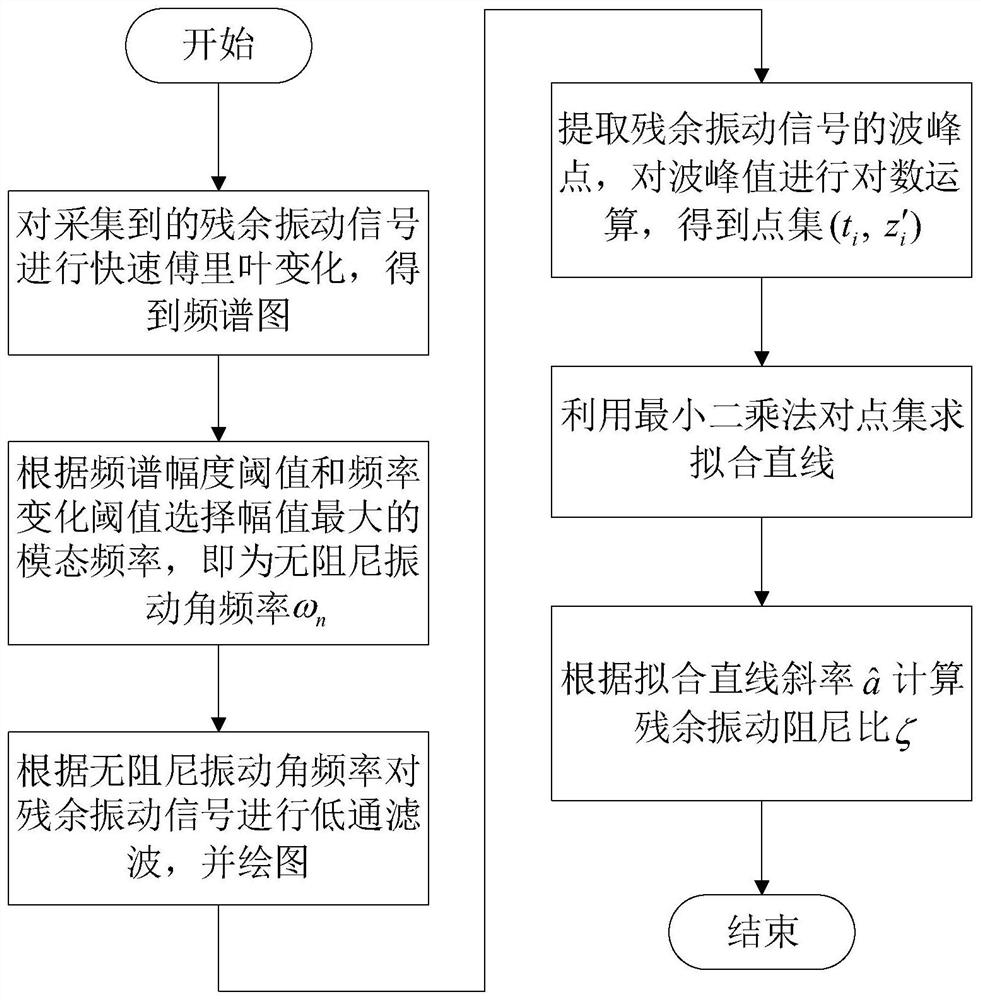
[0120] S2. Control the industrial robot 4 to perform initial trajectory interpolation motion, measure the acceleration signal of the residual vibration at the end of the industrial robot after the motion, and calculate the damping ratio ζ and the undamped vibration angular frequency ω of the residual vibration n ;
[0121] S3. According to the residual vibration mode at the end of the industrial robot, perform exponential filter trajectory planning on the industrial robot to generate a shaping interpolation trajectory with vibration suppression function;
[0122] S4. Control the industrial robot 4 to perform t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More