

Multi-margin pump valve combined hydraulic system for electro-hydraulic servo six-degree-of-freedom parallel robot
An electro-hydraulic servo and hydraulic system technology, applied in the direction of fluid pressure actuation system safety, fluid pressure actuation system components, servo motors, etc., can solve problems such as movement disorder, servo valve spool stuck, task failure, etc., to achieve Smooth system pressure fluctuations, smooth pipeline pressure fluctuations, and improve work stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further elaborated and described below in conjunction with specific embodiments. The described embodiments are merely exemplary of the present disclosure and do not delineate the scope of limitation. The technical features of the various embodiments of the present invention can be combined correspondingly on the premise that there is no conflict with each other.
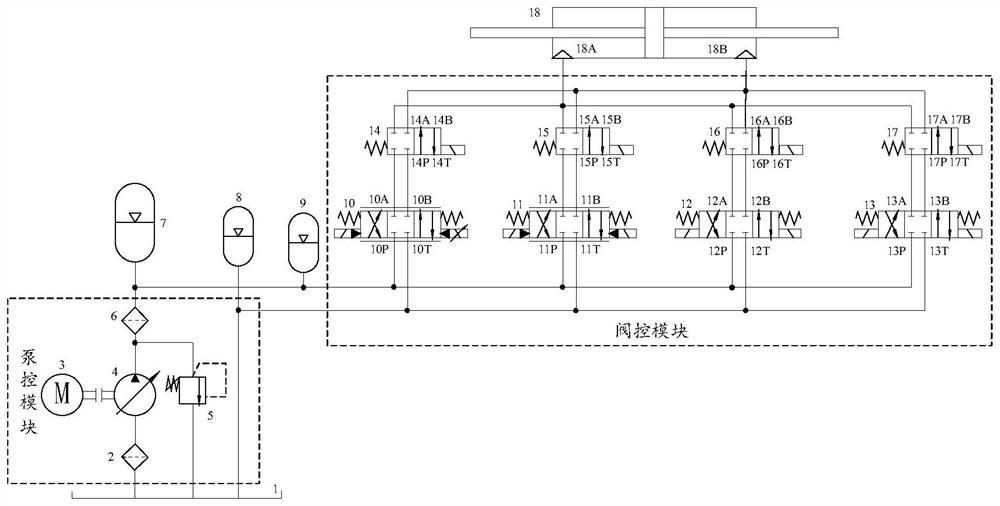
[0017] like figure 1 As shown, the multi-margin pump-valve combined hydraulic system for an electro-hydraulic servo six-degree-of-freedom parallel robot of this embodiment includes a hydrostatic support servo cylinder, a valve control module and a pump control module;
[0018] The pump control module includes a fuel tank 1, a low pressure filter 2, a motor 3, a high pressure variable pump 4, a relief valve 5, a high pressure filter 6, a pump station accumulator 7, a first accumulator 8, a second energy accumulator device 9; the oil inlet of the high pressure variable pump 4 is c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More