

Robot navigation system and navigation method
A navigation system and robot technology, applied in navigation, surveying and navigation, radio wave measurement system, etc., can solve the problem of high maintenance cost, and achieve the effect of simple layout, low design or purchase cost, and easy modification and maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in detail below in conjunction with the accompanying drawings. It should be noted that the described embodiments are only intended to facilitate the understanding of the present invention, rather than limiting it in any way.
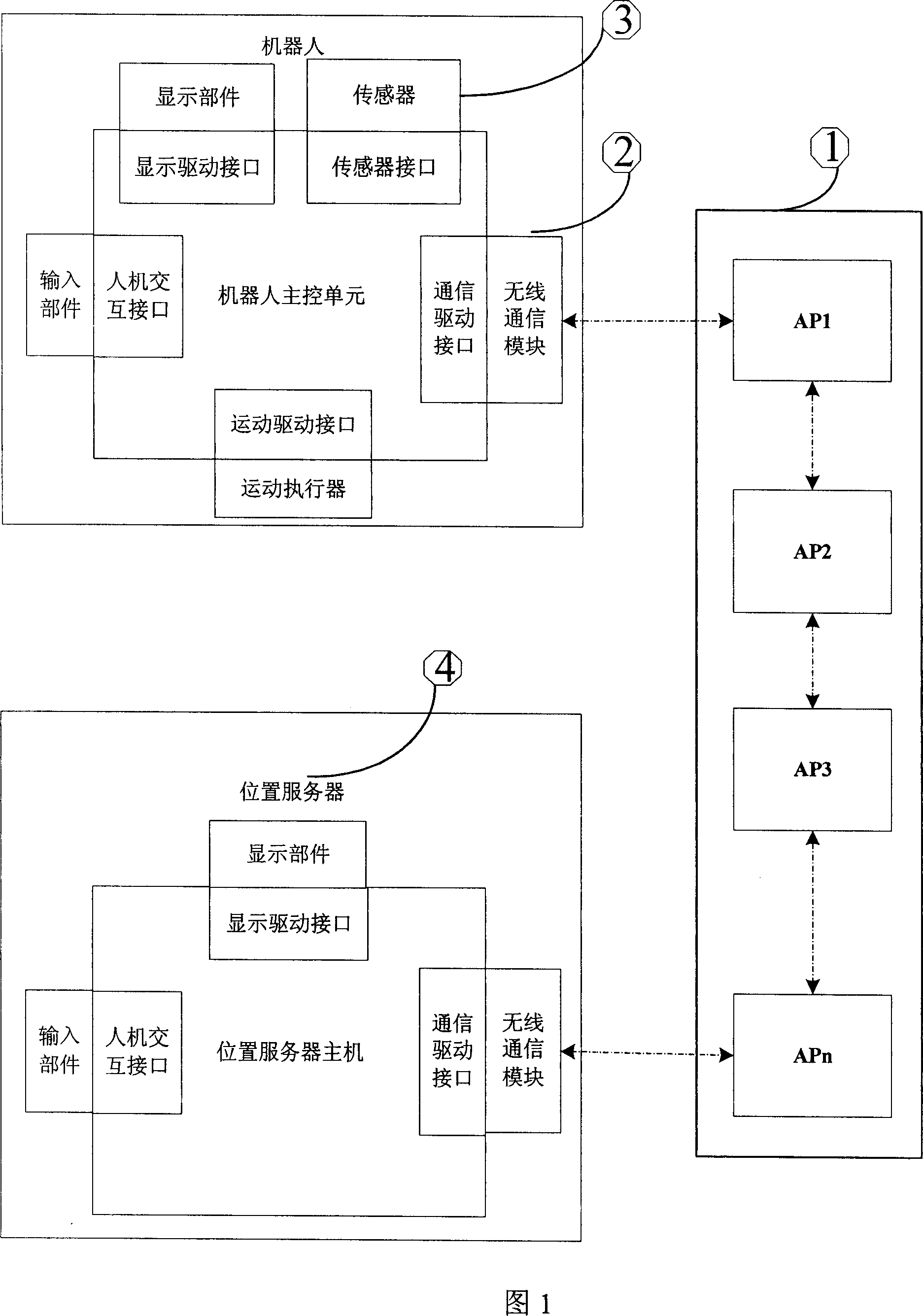
[0048] As shown in Fig. 1 structural block diagram of the present invention comprises:
[0049] The navigation network 1 has: n wireless access points AP1-APn connected wirelessly, forming mutual communication and realizing a shared network system, where n is a natural number. The implementation of the wireless access point adopts the ZigBee specification, that is, IEEE 802.15.4 or the WLAN specification, that is, IEEE 802.11x (x can be a, b, g or n) or a non-standard custom protocol under the ISM frequency band, and the antenna adopts an omnidirectional antenna. The layout of wireless access points is related to the positioning accuracy requirements of the robot, the size of the coverage area of the navig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More