

Vehicle-mounted high-speed road inspection system and data acquisition and processing method
A technology of expressway and inspection system, applied in the direction of inspection time patrol, etc., can solve the problems of high rate of missed judgment, misjudgment, easy omission and misjudgment, etc., to ensure reliability, ensure data accuracy, improve quality and speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0066] A vehicle-mounted highway inspection system includes a data acquisition system and a data processing system.
[0067] Data acquisition system, including:
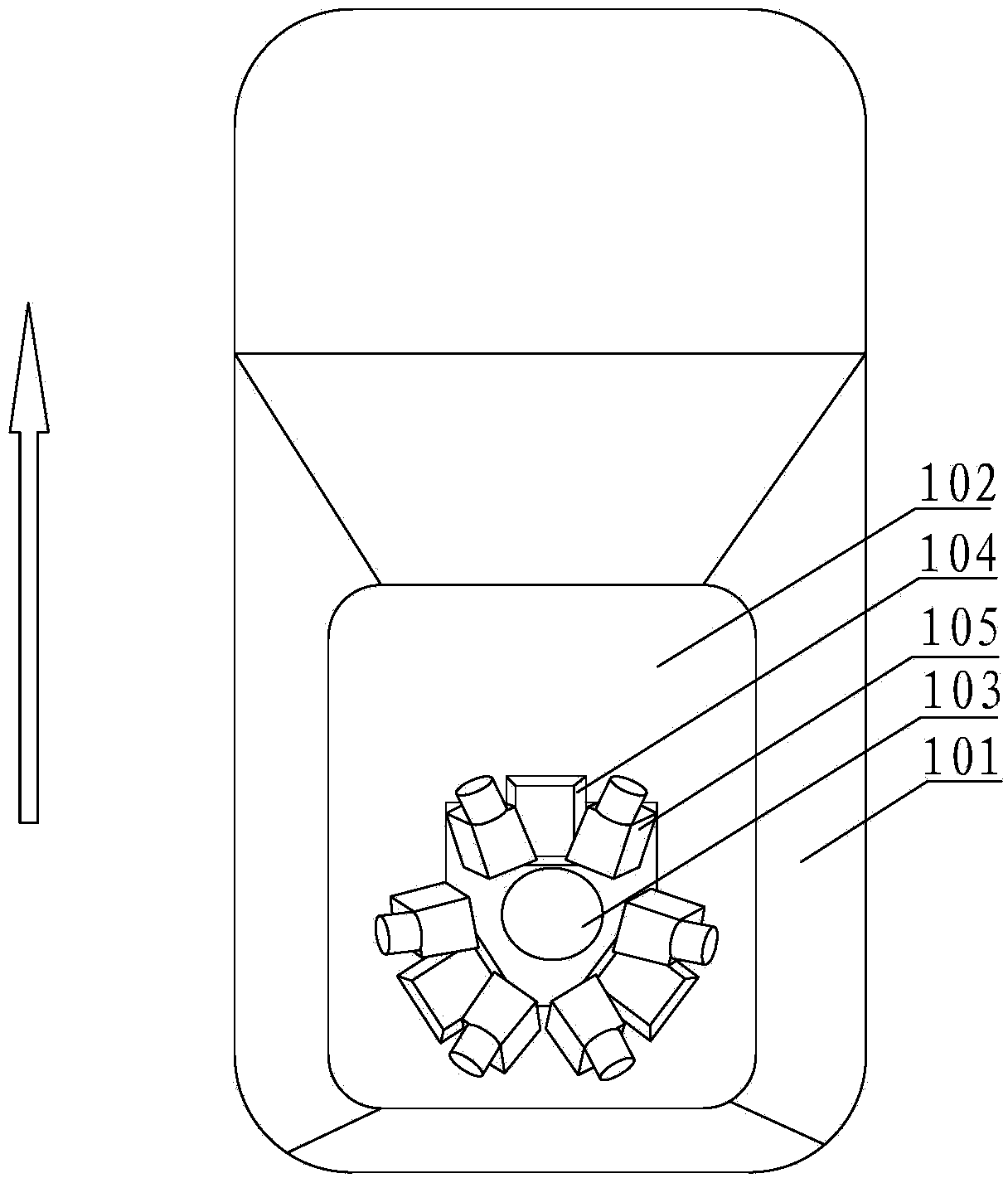
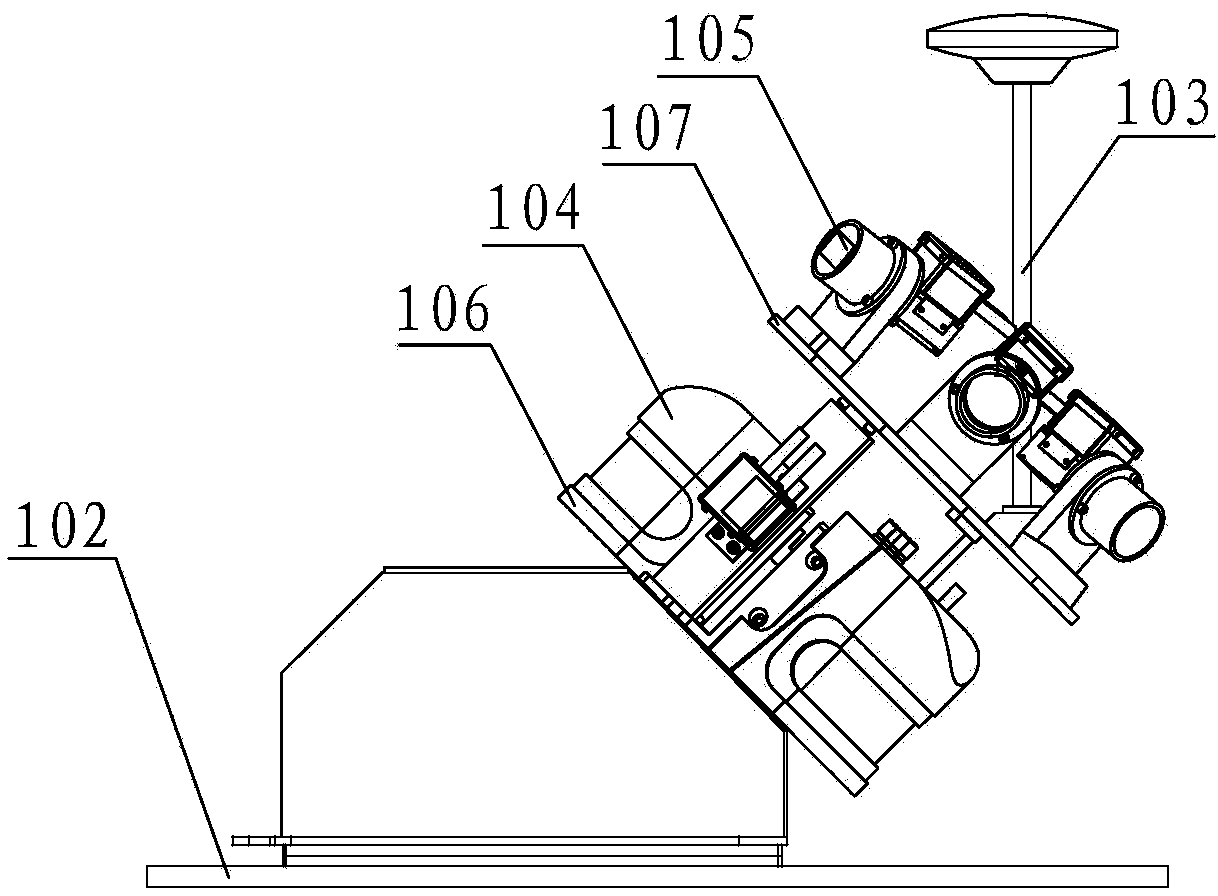
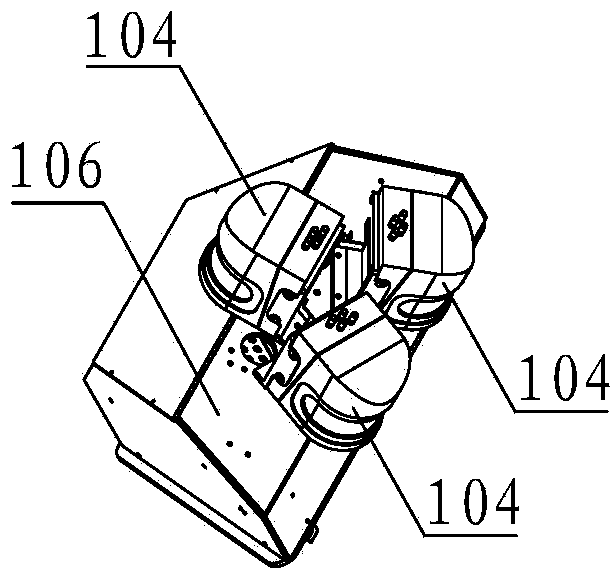
[0068] Data acquisition equipment, including GPS receivers and antennas, inertial measurement units, laser scanners, and industrial CCD cameras, used to collect raw laser point clouds, images, and GPS / INS data related to highway road condition indicators;
[0069] The data acquisition industrial computer is used to receive and store the data collected by each data acquisition device, and the industrial CCD camera is connected to the data acquisition industrial computer through a cable;
[0070] The monitoring computer is connected to the same local area network with each data acquisition device and data acquisition industrial computer through a network switch, and interacts with data and status through a custom protocol based on TCP / IP;
[0071] Synchronization controller, used to coordinate time synchronization, st...
Embodiment 2
[0080] A data acquisition method of a vehicle-mounted highway inspection system, using the vehicle-mounted highway inspection system in Embodiment 1, such as Figure 5 As mentioned above, the monitoring design of the data acquisition system adopts the CS architecture. One end of the monitoring computer is used as the client, and the other end of the data acquisition device is used as the server. Control commands are sent to the server through the client, and the client runs the monitoring program. Data acquisition equipment control, data acquisition, data display and status display of each data acquisition equipment.
[0081] The process of data acquisition is to use each data acquisition device and monitoring computer in the same local area network, and to exchange data and status through a custom protocol based on TCP / IP. Image 6 A frame diagram of data acquisition and storage is shown.
[0082] like Figure 7 As shown, the monitoring computer runs the monitoring program ...
Embodiment 3
[0093] A data processing method for a vehicle-mounted highway inspection system, using the vehicle-mounted highway inspection system in Embodiment 1, the original data collected during the highway inspection process includes laser point clouds, images, and GPS / INS data. The data processing method includes the following data processing steps:
[0094] aData preprocessing
[0095] Perform data analysis, attitude calibration, format conversion and project management output on the original laser point cloud, image and GPS / INS data acquired during the highway inspection process, such as Figure 8 Shown:
[0096] GPS / INS data processing
[0097] (1) Perform differential calculation on GPS data and analyze data accuracy;
[0098] (2) Combining differential GPS data and inertial navigation data for calculation, outputting high-precision time, position and attitude information;
[0099] Laser Scanner Preprocessing
[0100] (1) Perform signal filtering and denoising on the laser po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More