

Artificial-intelligence exercise assisting device
A technology of artificial intelligence and auxiliary equipment, which is applied in the direction of equipment to help people walk, passive exercise equipment, medical science, etc., can solve problems such as difficult control accuracy, small motor rotation angle, inconvenient wearing, etc., and achieve stability Insufficient, simple structure, light weight effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0139] The first embodiment of the present invention: the learning mode of the exoskeleton robot refers to that before the user wears the machine for walking, the user needs to train the machine so that the machine can memorize the movement posture, and then form the machine's own artificial intelligence.
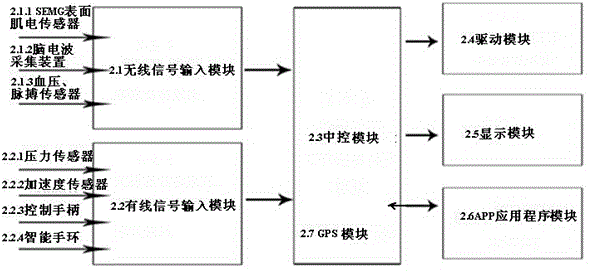
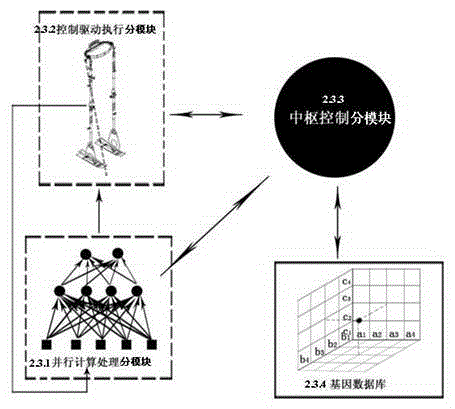
[0140] (1) All the sensors of the exoskeleton robot are organized and circulated, and the multi-layer neural network is used for parallel processing in 2.3.1. The sensor signals 2.1.1, 2.1.2, 2.1.3, 2.2.1, 2.2.2, 2.2.3, 2.2.4, 2.6, 2.7 form the input vector data and import them into 2.3.1-1.
[0141] (2) Extract the weight vector in 2.3.1-2 from the gene sequence of the gene database in 2.3.4.
[0142] (3) The extracted 2.3.1-2 weight vector data and the collected sensor signals are fused and calculated one by one, and the state threshold of the current neuron sub-module is calculated and passed to 2.3.1-3.
[0143] (4) Compare this threshold value with that recorded in th...
no. 2 example
[0147] The second embodiment of the present invention: the exoskeleton robot self-balancing power-assisted motion mode is to integrate the driving signal of the human body with the operating state of the equipment and the machine intelligence. In this state, when the user intends to lift his legs and walk, 2.1.1 SEMG electromyography sensor collects the muscle electrical signal and then mixes it with the body center of gravity signal collected in 2.2.2 and the motion state signal collected in 2.2.3 After confirming that the center of gravity of the human body still falls within the triangular area formed by the cane and the biped after taking this step, and conforms to the existing safe walking mode of the system, the system drives the motor drive circuit. see Figure 4 Flow chart of power-assisted motion mode control.
[0148] (1) All the sensors of the exoskeleton robot are organized and circulated, and the multi-layer neural network is used for parallel processing in 2.3.1...
no. 3 example
[0153] The third embodiment of the present invention: recovery and cruising mode means that after the user wears the machine, it only relies on machine intelligence to automatically maintain a balanced operation.
[0154] (1) The exoskeleton robot 2.1.2, 2.2.1 organizes the loop, and the signal of the sensor forms the input vector data and imports it into the multi-layer neural network for parallel processing.
[0155] (2) Extract the weight vector in 2.3.1-2 from the gene sequence of the gene database in 2.3.4.
[0156] (3) The weight vector extracted in 2.3.1-2 is fused with the collected sensor signals one by one, and the state threshold of the current neuron sub-module is calculated and passed to 2.3.1-3.
[0157] (4) If this threshold is reached to activate the 2.3.1-4 neuron, determine the drive mode to which the call 2.3.1-4 is directed. If the threshold is not reached, return to step 3 and continue calling the next set of genetic data.
[0158] (5) Once the reverse tor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More