

Flexible spacecraft sensor fault adjustment method
A flexible spacecraft and sensor failure technology, applied in the field of aerospace flight control, can solve the problems of long sliding surface time, unfavorable application and promotion, and lack of timeliness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
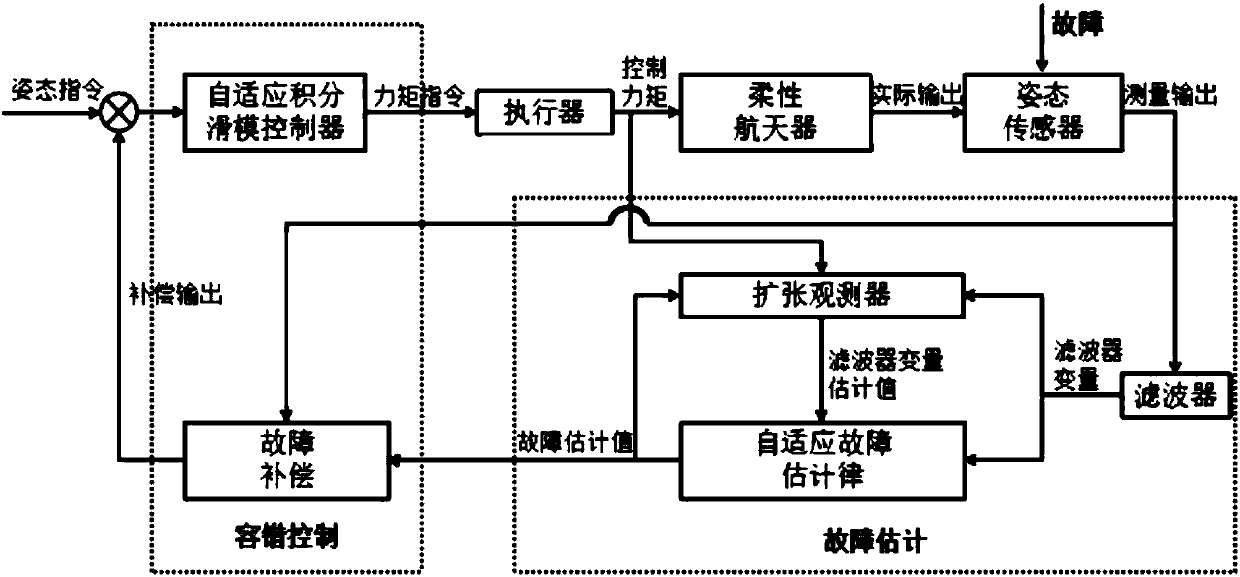
[0081] like figure 1 As shown, the sensor output signal is directly compensated by using the fault estimation information, and the influence of the fault on the system is eliminated through the fault-tolerant controller, so that the system has a strong tolerance to the sensor fault. When , people can quickly and accurately track the desired attitude commands.
[0082] A flexible spacecraft sensor fault adjustment method based on adaptive integral sliding mode output feedback control in this embodiment includes the following steps:
[0083] Step 1. Establish a dynamic model of the flexible spacecraft, as follows:
[0084]
[0085]
[0086] where θ(t)∈R 3×1 Indicates the attitude angle vector, including the roll angle θ x , pitch angle θ y and yaw angle θ z ; η(t)∈R n x 1 Indicates the elastic mode of the flexible attachment relative to the body coordinate system, n is the number of flexible attachments; u(t)∈R 3×1 Indicates the control torque; J∈R 3×3 Denotes the...
Embodiment 2
[0139] A flexible spacecraft sensor fault adjustment method in this embodiment uses Matlab2012b software to simulate and verify the invented fault estimation and fault-tolerant control method:
[0140] (1) Parameter selection of flexible spacecraft attitude control system:
[0141] total inertia matrix The number of flexible accessories n=4, rigid-flexible coupling matrix damping matrix stiffness matrix
[0142] (2) Initial parameter selection:
[0143] roll angle θ x (0)=1.0deg, pitch angle θ y (0) = 2.0deg and yaw angle θ z (0)=-1.0deg, the reference input is selected as 0deg, and the initial value of the elastic mode is η 1 (0)=0.006, η 2 (0)=0.004, η 3 (0)=0.005, η 4 (0)=-0.003.
[0144] (3) Sensor fault setting:
[0145] Assuming that the fault only occurs on the roll angle measurement channel, that is, the first measurement channel, the fault function is set as:
[0146]
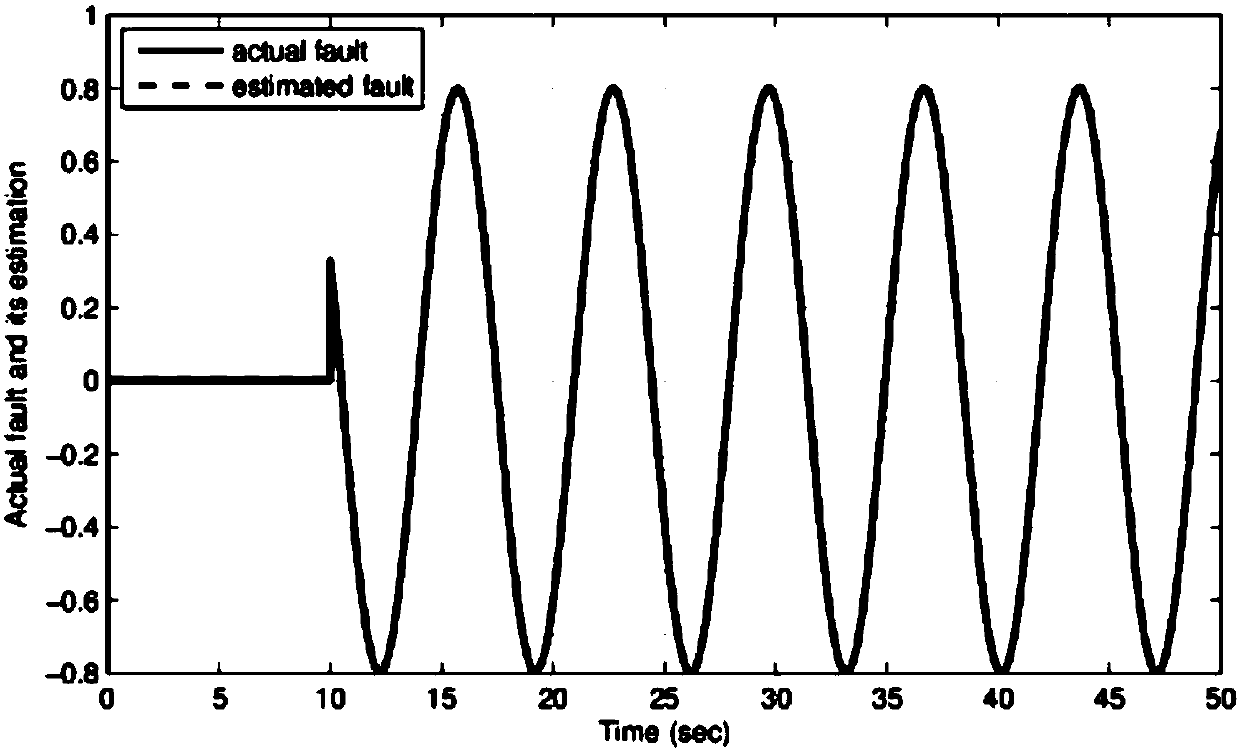
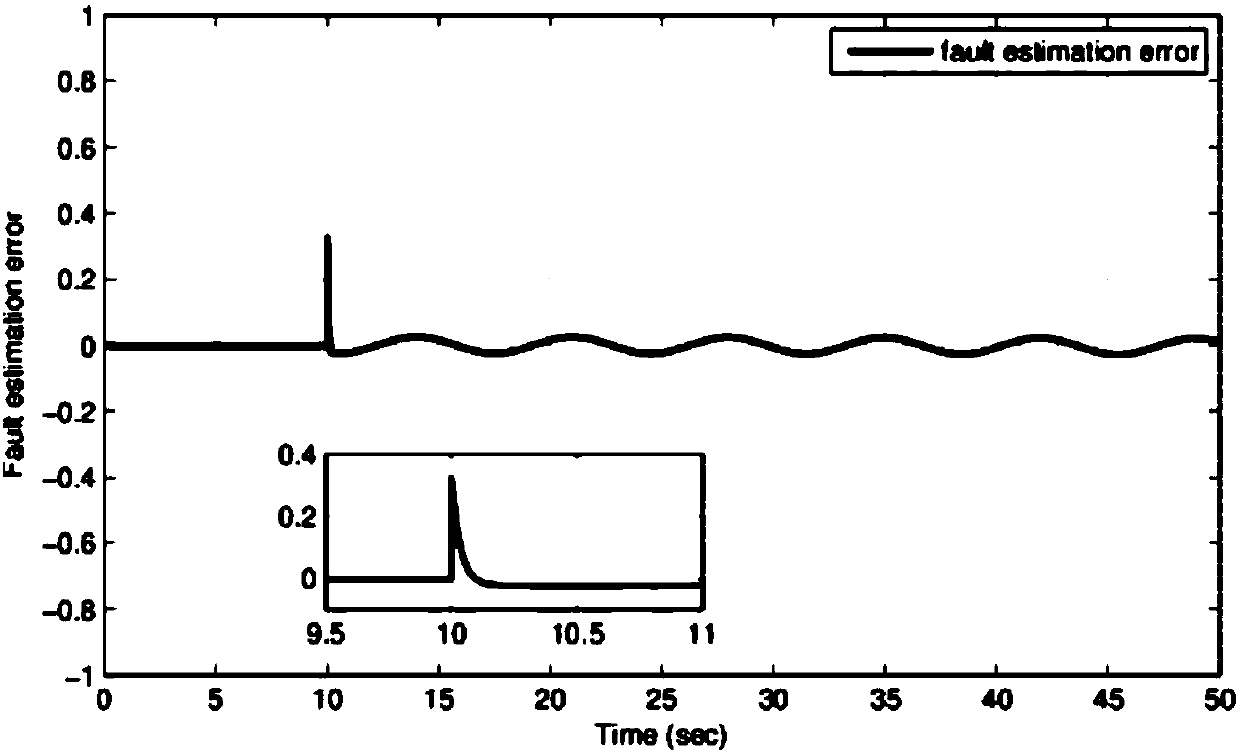
[0147] Result description:
[0148] like figure 2 and image 3 As shown, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More