

Double-layer Kalman filter-based intermittent failure diagnosis and active fault-tolerant control method
A technology of fault diagnosis and fault-tolerant control, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of limited detection and isolation, lack of intermittent fault estimation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
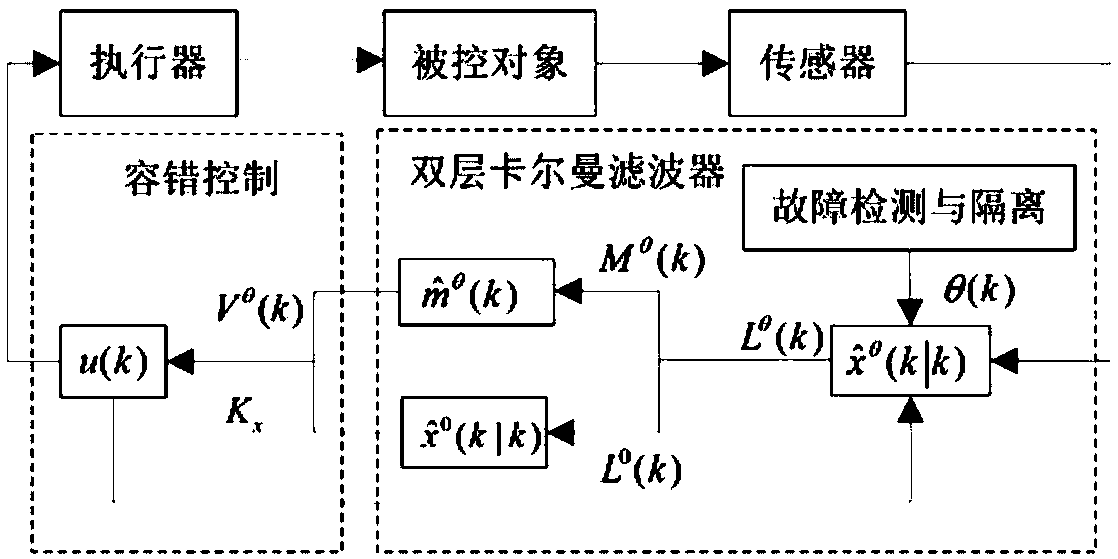
[0182] In this embodiment, a kind of intermittent fault diagnosis and active fault-tolerant control method based on double-layer Kalman filter comprises the following steps:
[0183] (1) System and problem description
[0184] Consider the following linear discrete-time system with intermittent failures:
[0185]
[0186] x(k)∈R n , u(k)∈R q , y(k)∈R m , m θ (k)∈R q represent the system state, control input, system output and intermittent fault matrix, respectively. A, B, C, F are known matrices with appropriate dimensions. In this paper, considering the intermittent failure of the actuator, B=F. Without loss of generality, the external disturbance w(k)∈R n , v(k)∈R m As Gaussian white noise, and E(w(k))=0, E(w(k)w T (k))=W; E(v(k))=0, E(v(k)v T (k)) = V;
[0187] Among them, W and V are positive definite symmetric matrices, and it is assumed that w(k) and v(k) are irrelevant, that is, cov(w(k), v(k))=0.
[0188] Assume that the initial state x(0) of the system ...
Embodiment 2
[0351] Consider the following DC motor control system experiencing intermittent failures:
[0352] x=[i a ω] T , u=v a ,
[0353] where i a , ω and v arepresent the armature current, angular velocity and armature voltage, respectively. R a is the armature resistance, L a is inductance. K v and K n are the voltage and motor constants, J i is the moment of inertia, B 0 coefficient of friction. The control objective of this embodiment is to regulate the output voltage, armature current and angular velocity to zero. y is the measured value of motor terminal voltage U, and its expression is U=C e Φn+i a R a , C e is the motor constant (see literature: Papa Thomas T V, Scuderi Deceased.R, White C E B MS. Rectifier control system for a DC power plant system: CA, US4451773[P].1984.; Keller J Y, Sauter D D J. Kalman Filter for Discrete-Time Stochastic Linear Systems Subject to Intermittent Unknown Inputs[J]. IEEE Transactions on Automatic Control,2013,58(7):1882-18...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More