

A wall-climbing bridge wind pressure alarm robot and control method
A robot and alarm technology, applied in the field of robots, can solve problems such as unadjustable height, inaccurate wind pressure monitoring data, hidden dangers to pedestrians and staff, and achieve the effect of ensuring safety and improving the performance of wind pressure monitoring and alarming.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
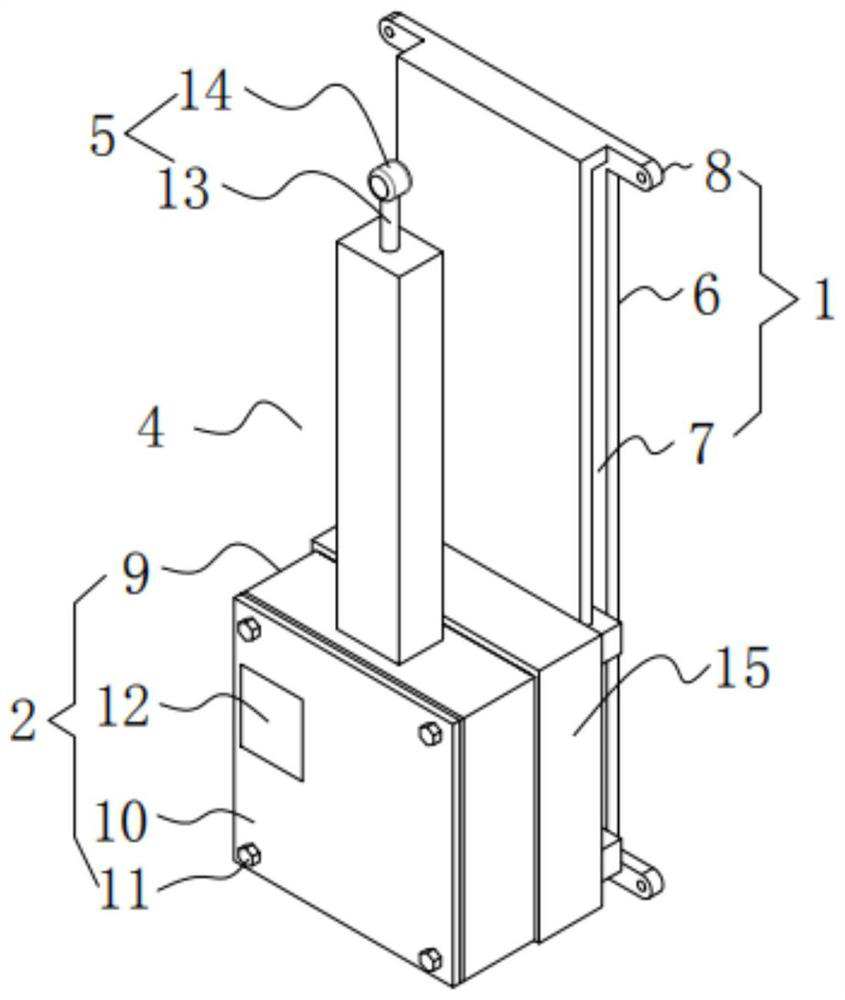
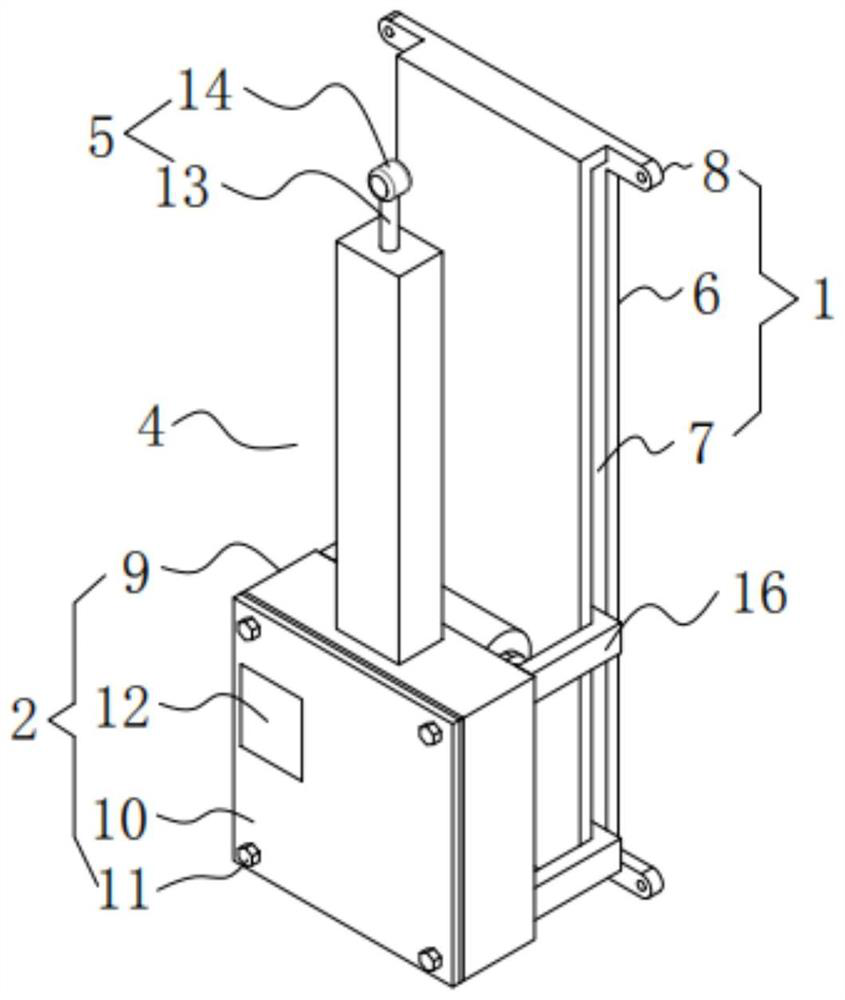
[0055] A wall-climbing bridge wind pressure alarm robot, such as Figure 1-2 As shown, it includes a climbing wall walkway 1, a control part 2, a crawling unit 3, a lifting unit 4, a wind pressure detection unit 5 and an alarm 34, and the control part 2 is connected to the climbing wall walkway 1 through the crawling unit 3. , the wind pressure detection unit 5 is fixedly installed on the upper part of the control part 2 through the lifting unit 4 , and the alarm 34 is fixedly installed inside the control part 2 .
[0056] By adopting the above-mentioned technical scheme, the wall-climbing walkway 1 is used as the basis for the robot to climb the wall, the control part 2 is used to control the operation of the robot, the crawling unit 3 is used to crawl along the wall-climbing walkway 1 to drive the robot to move up and down, and the lifting unit 4 is used to further enhance the height where the wind pressure detection unit 5 is located, and the alarm 34 is used to send an ala...
Embodiment 2
[0081] The difference from Example 1 is that a protective layer is also provided on the surfaces of the first motor 20 and the second motor 26, and the protective layer is prepared by the following method:
[0082] Take the following raw materials and weigh them by weight: 20 parts of epoxy resin, 8 parts of calcium carbonate powder, 14 parts of acrylic emulsion, 9 parts of titanium dioxide powder, 8 parts of mica powder, 10 parts of polyurethane, 10 parts of antimony trioxide particles, 3 parts of paraffin wax 2 parts, 12 parts of alcohol ester, 2 parts of triethanolamine, 2 parts of emulsified silicone oil and 30 parts of ethanol;
[0083] S1. Add the weighed acrylic emulsion, paraffin wax, alcohol ester dodeca, triethanolamine, emulsified silicone oil and ethanol into the mixer and stir for 20min at a stirring speed of 600r / min to prepare a mixed solution;
[0084] S2, adding epoxy resin, calcium carbonate powder, titanium dioxide powder, mica powder, polyurethane and antim...
Embodiment 3
[0090] The difference with embodiment 2 is the preparation of protective layer, and its specific preparation method is as follows:
[0091] Take the following raw materials and weigh them by weight: 23 parts of epoxy resin, 10 parts of calcium carbonate powder, 16 parts of acrylic emulsion, 11 parts of titanium dioxide powder, 9 parts of mica powder, 13 parts of polyurethane, 13 parts of antimony trioxide particles, 4 parts of paraffin wax 3 parts, 12 parts of alcohol ester, 3 parts of triethanolamine, 3 parts of emulsified silicone oil and 40 parts of ethanol;
[0092] S1. Add the weighed acrylic emulsion, paraffin wax, alcohol ester dodeca, triethanolamine, emulsified silicone oil and ethanol into the mixer and stir for 25min at a stirring speed of 700r / min to prepare a mixed solution;
[0093] S2, adding epoxy resin, calcium carbonate powder, titanium dioxide powder, mica powder, polyurethane and antimony trioxide particles into the pulverizer and pulverizing until the part...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More