

Modal parameter and vibration response calculation method for rotating joint type industrial robot
An industrial robot and vibration response technology, applied in complex mathematical operations, special data processing applications, instruments, etc., can solve problems such as slow calculation speed, complex modeling methods, and complex dynamic equations, achieving a high degree of stylization and improving Calculation speed and good versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
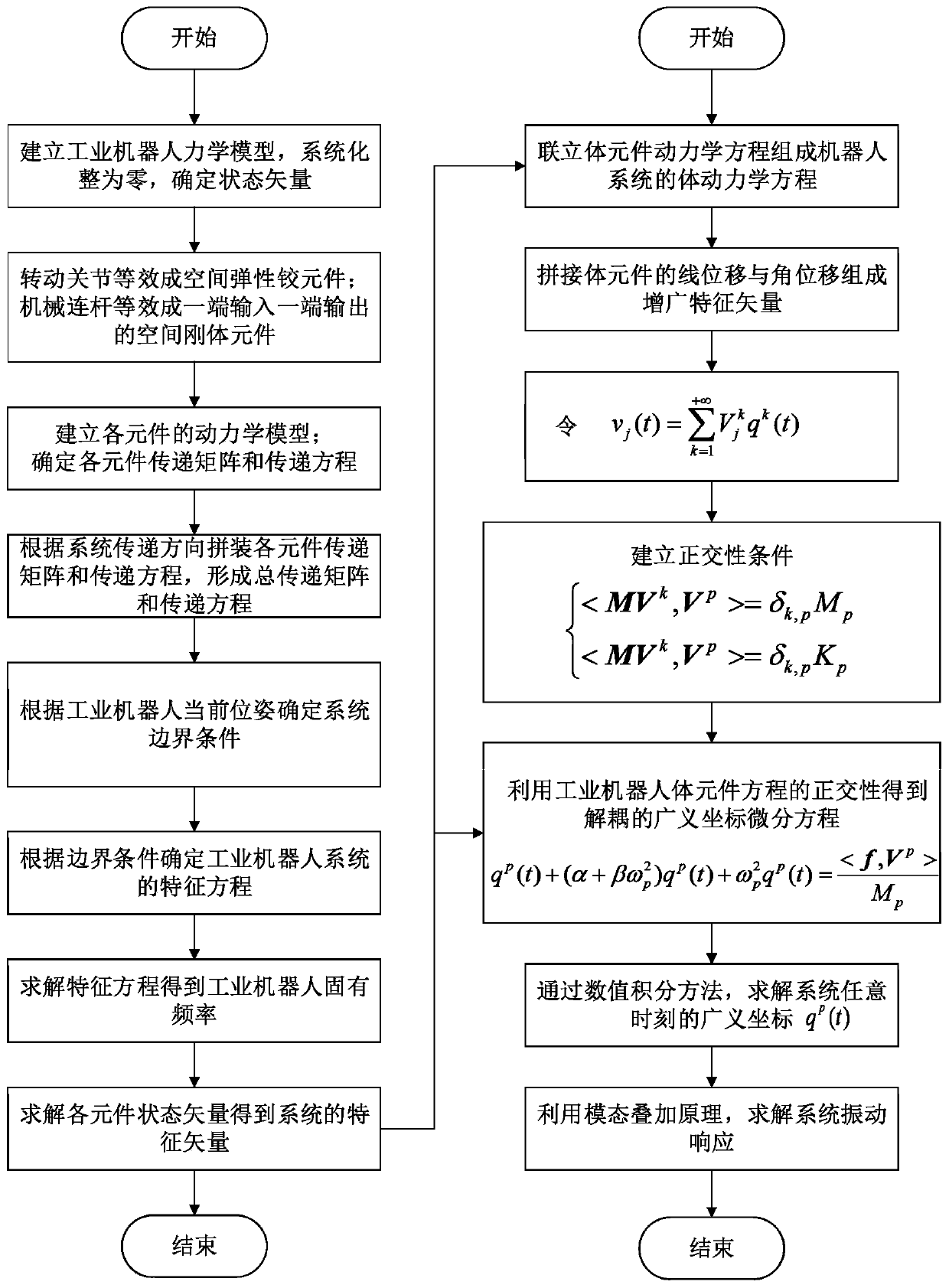
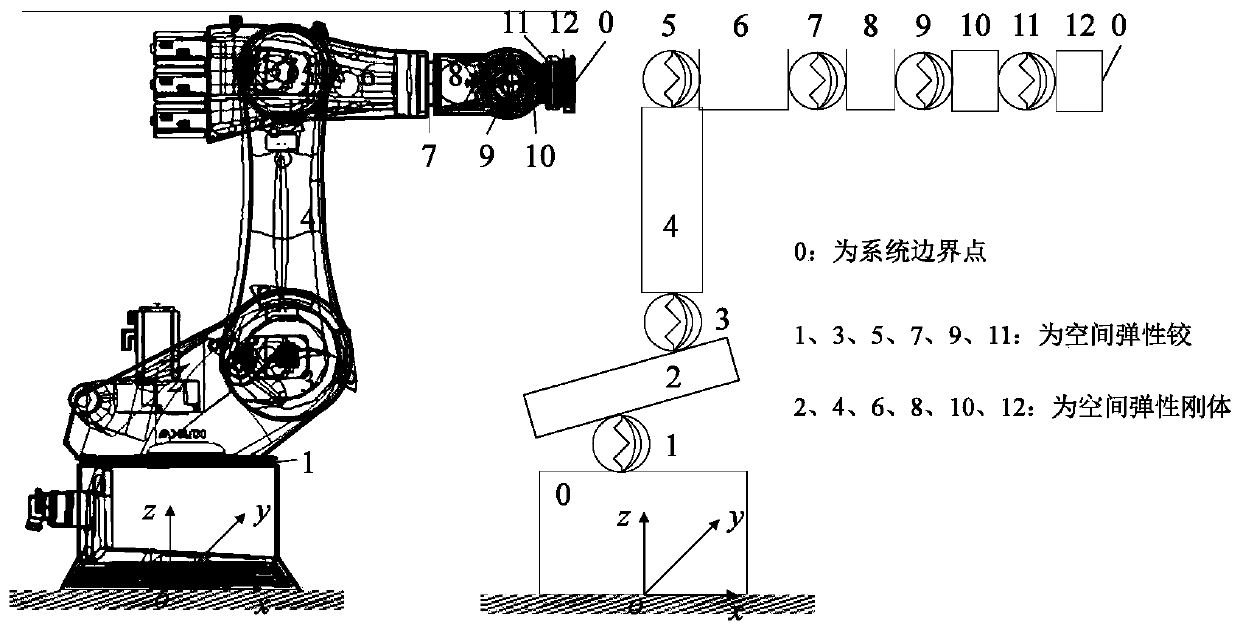
[0053]Step 1: Extract the main structural elements of the industrial robot to be modeled, including mechanical links and rotating joints, and number each element uniformly.
[0054] According to the natural properties of each part of the industrial robot, the overall structure of the industrial robot is divided into parts, the structural model of the industrial robot is split, and the main structural features of the industrial robot to be modeled are extracted, including the manipulator arm and the rotating joint, which are divided into 12 parts in total. It consists of 6 rotating joints and 6 mechanical links. The rotating joint is equivalent to a hinge element, and the mechanical link is equivalent to a body element with one input and one output. The 12 links of the industrial robot are based on the original structure. Some assembly sequences are numbered uniformly: 0 corresponds to all boundary points; 1, 3, 5, 7, 9, and 11 correspond to rotary joints 1 to 6, respectively; 2...
Embodiment 2
[0137] The scheme is basically the same, the only difference is that when the industrial robot will install the end effector at the flange in the actual industrial application, in order to calculate the vibration characteristics and vibration response of the industrial robot processing system, in the existing industrial robot transfer matrix U all On the basis of left-multiplying the transfer matrix U of the end effector E , the overall new transfer matrix U can be obtained all-New =U E U all, the system vibration characteristics and vibration response can be calculated according to steps 5 to 7.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More