

Virtual probe for remote cardiac ultrasound and diagnosis and treatment system
A technology of virtual probe and diagnosis and treatment system, applied in ultrasonic/sonic/infrasonic diagnosis, ultrasonic/sonic/infrasonic Permian technology, sound wave diagnosis, etc. It can solve the problem that the virtual probe is not small enough to be integrated, the ultrasonic image of the patient is accidentally injured, and the data exchange is not enough Real-time and other issues to achieve the effect of saving business training time, avoiding accidents in time, and clear ultrasound imaging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0051] The base of the robotic arm is fixed, and the patient's movement is the main way to adjust the position.
[0052] The specific content is as follows:
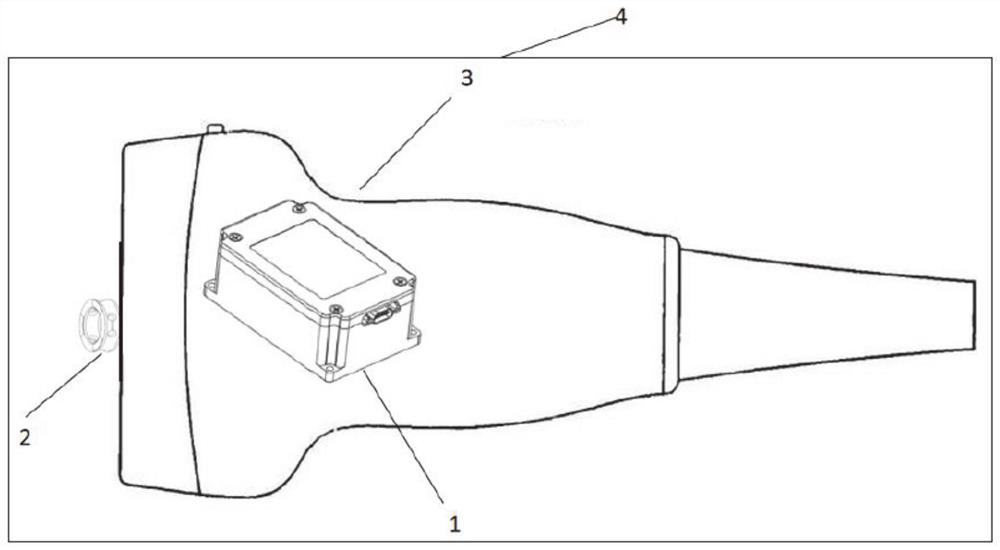
[0053] Such as figure 1 As shown, the virtual ultrasonic probe 1 is used to transmit the position and posture of the remote-end expert when operating the probe and the force acting on the human body model to the on-site mechanical arm to reproduce the expert's actions.
[0054] In a preferred embodiment, the virtual ultrasonic probe consists of a pose sensor 1 , a force sensor 2 and a 3D printed shell 3 .
[0055] The pose sensor 1 is fixed inside the 3D printed shell 3, and outputs the position and direction of the probe in real time.
[0056] In a preferred embodiment, the pose sensor 1 is installed on the center of gravity of the virtual probe 4, and the angular velocity output by the gyroscope is integrated to obtain the Euler angle. In order to avoid the phenomenon of gimbal lock in the Euler angle, the Euler angl...
Embodiment 2
[0071] The field end uses a mobile robot platform. The difference from Example 1 is that the base of the manipulator in Example 1 is fixed, so the working space of the manipulator is limited, and the manipulator in some detection postures cannot reach it. Therefore, the patient is required to Adjust your posture according to the instructions of the on-site staff, so that your part to be checked is always in the working space of the robotic arm. This optimal case uses the patient's movement as the main position adjustment method, which is suitable for the premise that the patient is in good physical condition and can move autonomously Down.
[0072] In this embodiment, the fixed robotic arm is replaced by a movable robot platform. The robot can move freely while holding the ultrasonic probe, and is no longer bound by the detection position. The position and direction of the probe should be adjusted until the posture is suitable, and then the posture and posture of the probe sho...
Embodiment 3
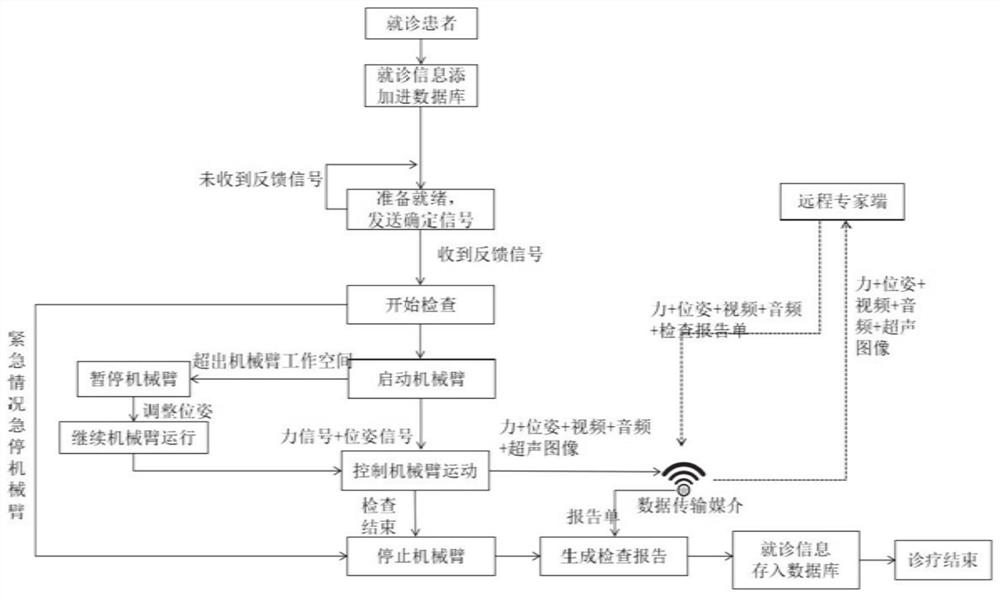
[0083] Figure 4 The direction of signal flow between the various components of teleultrasonography is given. The flow direction of the signal and the connection relationship between the various components are explained in detail below:
[0084] Remote ultrasonic examination is divided into remote end and on-site end. The equipment of each part is composed of: the remote end is composed of ultrasound operation experts, video equipment, virtual ultrasound probe, imitation human body model, ultrasound image display equipment, and server. The on-site end consists of on-site staff, patients, robot platforms, treatment beds, video equipment, servers, ultrasound probes, ultrasound scanners, and ultrasound image display equipment.
[0085] Specifically, the output end of the pose sensor is connected to the computer through a serial port. In order to avoid the gimbal lock phenomenon that is prone to appear in the Euler angle, the pose Euler angle collected by the pose sensor is conv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More