

Oral implant robot control system based on state capture and operation method thereof
A robot and robot movement technology, applied in surgical robots, dental implants, surgical manipulators, etc., can solve the problems of hole preparation axis deviation, behavioral conflicts, and the inability of robots to perceive and judge the environment, so as to achieve smooth cooperation and improve hole preparation The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings.
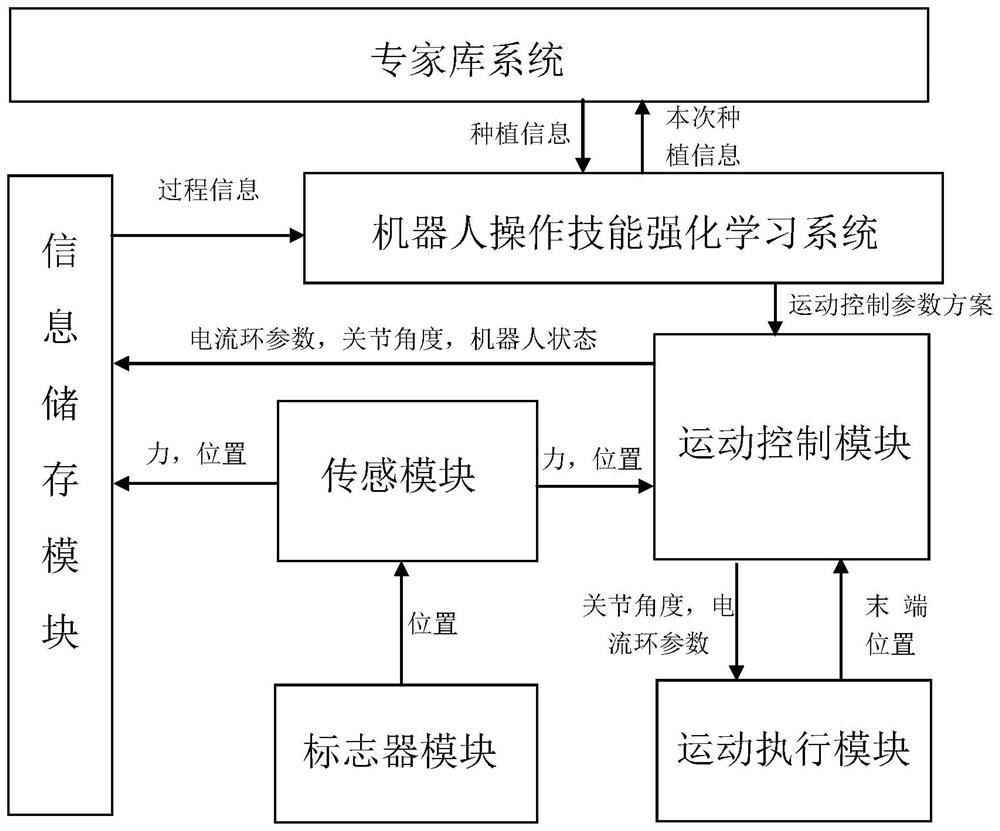
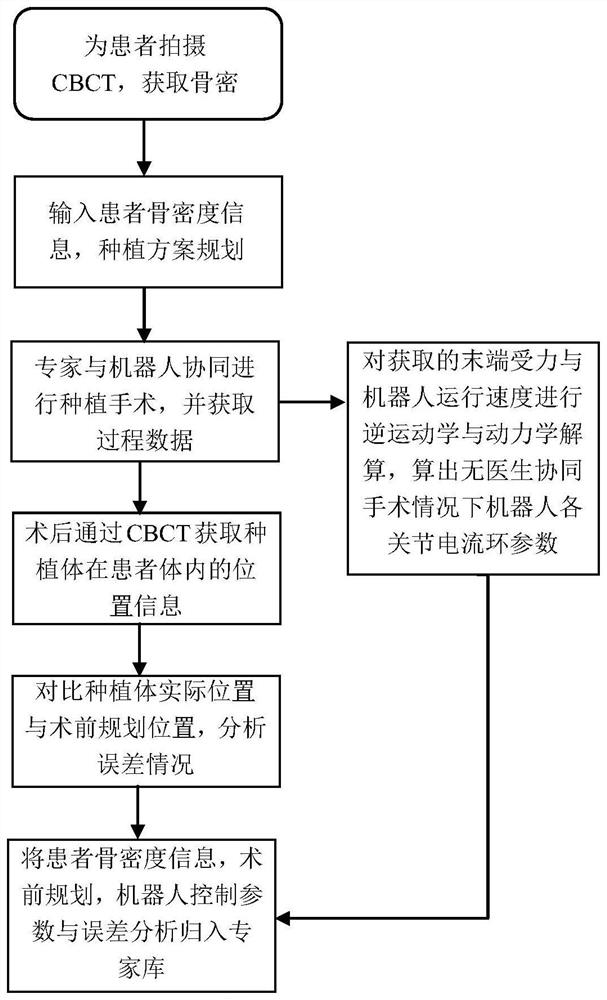
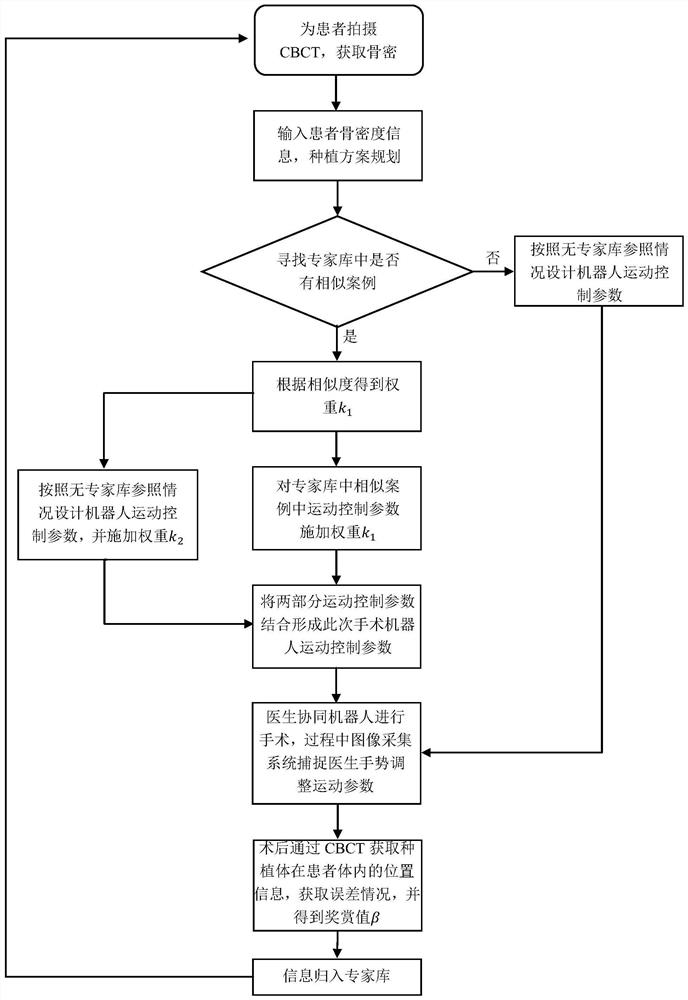
[0037] refer to Figure 1 ~ Figure 3 , a state-capture-based oral implant robot control system, comprising: a motion execution module, which is an oral implant robot body; a motion control module, including a robot control cabinet and a computer; a sensing module, including a six-dimensional force sensor and image information acquisition unit; marker module, including patient oral markers and gloves with markers; expert database system, including internal bone density information of patient's alveolar bone, implant plan, intraoperative robot motion state and control parameters, Error analysis; robot operation skills reinforcement learning system, and information storage module.
[0038] The motion control module is used to adjust and control the motion parameters of the motion execution module. The motion execution module completes corresponding actions. The six-dimen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More