

Inverted pendulum of remote car with two wheels and balance control method thereof
An inverted pendulum and trolley technology, which is applied in vehicle position/route/height control, attitude control, adaptive control, etc., can solve the problems that the algorithm cannot be realized, the control fails, and the control amount cannot be increased too much, so as to achieve the difficulty of control. added effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0060] Embodiment 1: Inverted pendulum of two-wheeled remote control trolley and its control method
[0061] 1. The hardware of the inverted pendulum of the two-wheeled remote control car:
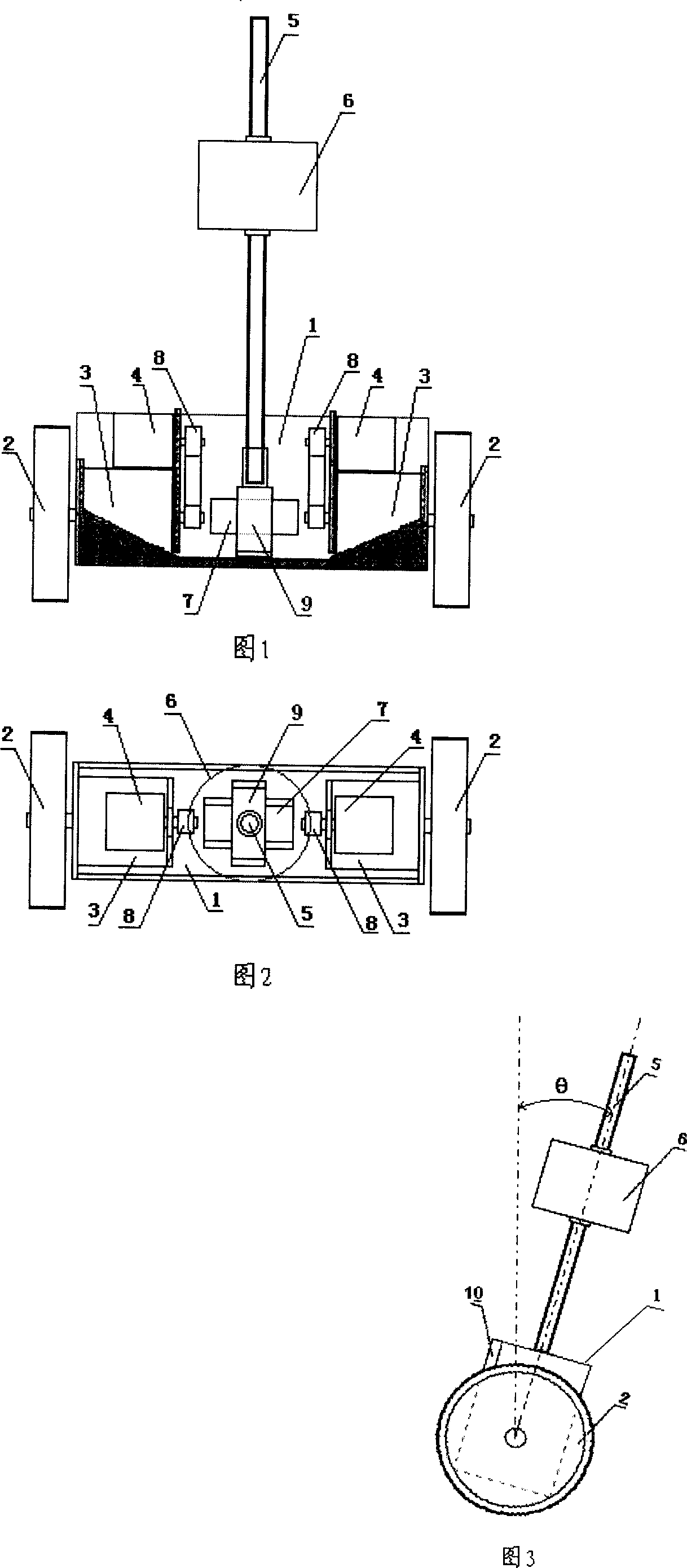
[0062] The chassis (230 * 80mm) and the "several" type support (9) (long * wide * high 64 * 30×60mm) is made of stainless steel plate (thickness 2mm) to ensure strength, wheels (2) (φ120mm), swing rod (5) (φ10*500mm) and other mechanical parts are made of aluminum alloy plate (thickness 2mm~3mm) To reduce the weight of the car. The installation of components should be evenly distributed as far as possible, so that the weight of the device is symmetrical, especially the weight of the car body perpendicular to the axle should be symmetrical.
[0063] 1. Selection of each functional module:
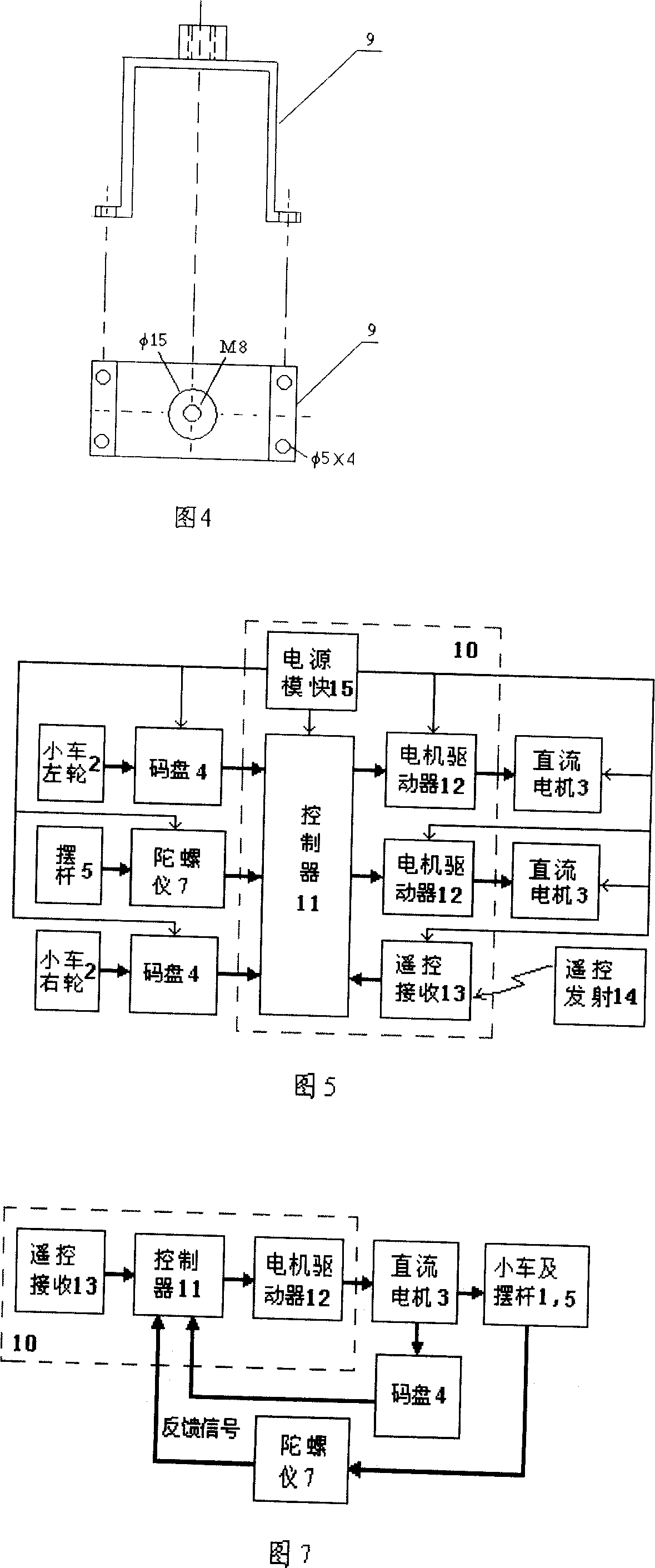
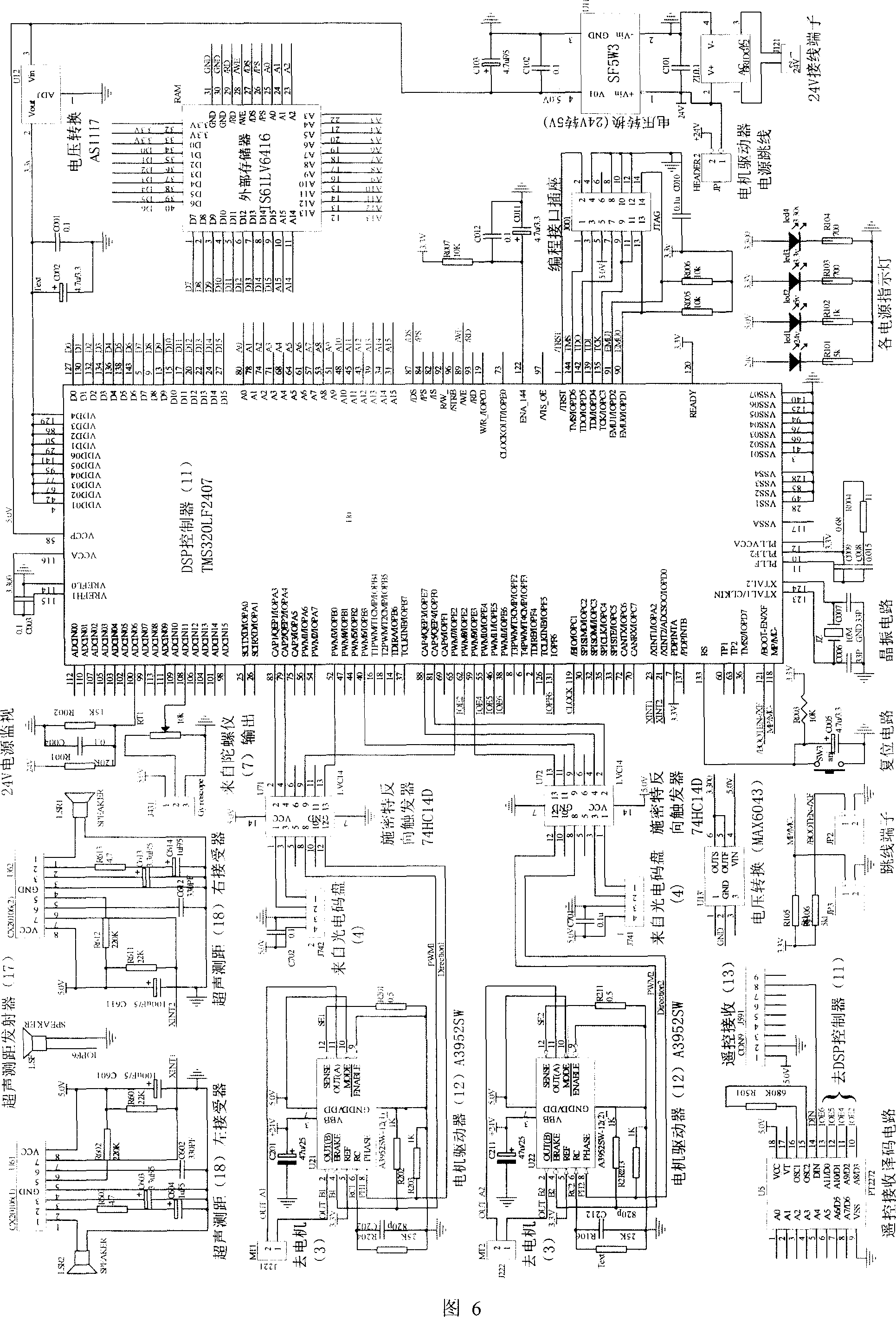
[0064]The controller (11) in the present embodiment adopts the digital signal processor DSP that model is TMS320LF2407; Use 5V, 3.3V and 3.300V voltage; This chip internal resource mainly comprises: t...
Embodiment 2
[0180] Example 2: Two-wheeled remote control trolley two-stage inverted pendulum and multi-stage inverted pendulum
[0181] Based on the embodiment of the inverted pendulum of the above-mentioned two-wheeled remote control trolley of the present invention, it can also be made into an inverted pendulum of two, three or more levels, as follows:
[0182] One of the manufacturing methods of the two-stage inverted pendulum, as shown in Figure 16: the car body (1) and the swing rod (5) rotate around the wheel (2) axis; Another fork (16), the fork (16) can rotate around the hinge point, and their rotation surfaces are all perpendicular to the axis of rotation; an additional angle measuring device is installed at the position coaxial with the axis of rotation at the hinge , so that it can measure the angle (θ1-θ2) formed between the two pendulums; in this way, the car body (1) and the original pendulum (5) affixed to it constitute the first level pendulum (bottom), and the first level...
Embodiment 3
[0186] Example 3: A two-wheeled remote control trolley capable of avoiding obstacles Two-stage inverted pendulum
[0187] Based on the embodiment 1 of the inverted pendulum of the above-mentioned two-wheeled remote control trolley of the present invention, the inverted pendulum can also be made to have the function of avoiding obstacles ahead, and the method is as follows:
[0188] The ultrasonic ranging module includes a transmitter (17) and two receivers (18). The ultrasonic module is similar to the remote control module and consists of two parts: transmitting and receiving. The transmitting part is composed of a 38KHZ frequency generator and an ultrasonic transmitting probe; the receiving part is composed of a receiving probe and a sensor amplifier circuit. Their power supply voltage is 5V; the 38KHZ frequency generator is implemented by the internal program of the DSP controller, and directly drives the transmitting probe through the IOPF6 port of the DSP controller; the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More