

Field-oriented control driving system and control method of brushless motor
A technology of brushless motor and magnetic field orientation, applied in control system, vector control system, motor generator control, etc., can solve the problems of output torque, limited output current, high cost of exoskeleton robot, driving effect cannot meet high-end requirements, etc. , to achieve the effect of high position control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. On the contrary, the purpose of providing these embodiments is to make the disclosure of the present invention more thorough and comprehensive.
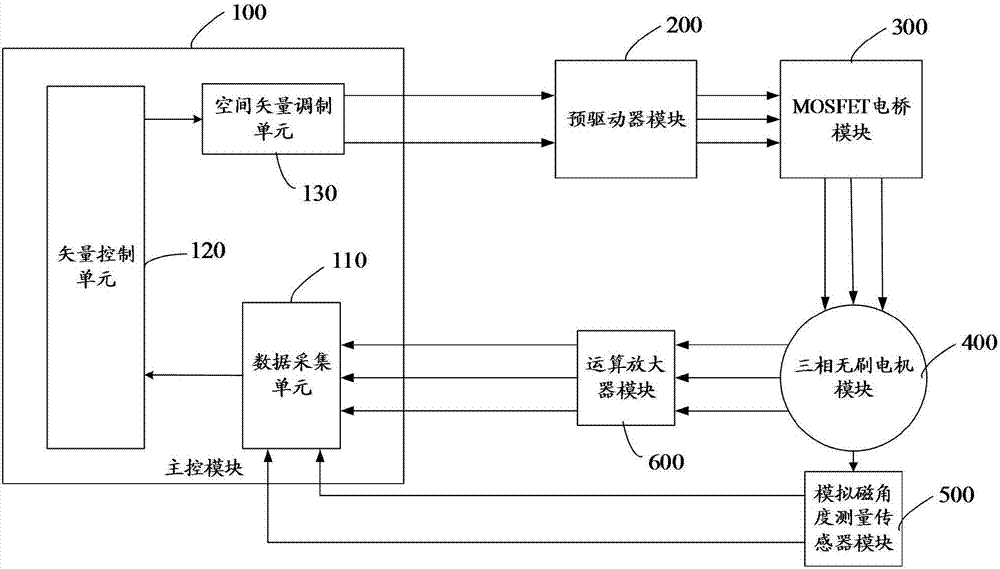
[0062] figure 1 It is a block diagram of a brushless motor field oriented control driving system of an embodiment. The brushless motor field-oriented control system includes a main control module 100 with a built-in field-oriented control algorithm, a pre-driver module 200, a MOSFET bridge module 300, a three-phase brushless motor module 400, an analog magnetic angle measurement sensor module 500, and an operational amplifier. Module 600.
[0063] Whe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More